Hi Everyone,
Just a short preface, I am an absolute beginner here to pixhawk and mission planner but I am trying to get telemetry data from the Pixhawk 6C mini running Arducopter v4.4 flashed via mission planner. I have be searching online, experimenting and looking forums for a couple of days but I am still quite lost.
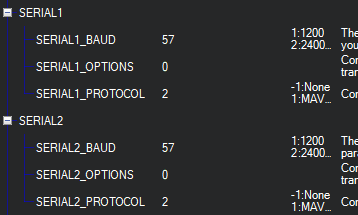
I am connecting an ESP32 to the Pixhawk via Telem 2 (UART) with the intention to receive the GNSS telemetry data on the ESP32. I have used mission planner to verify the correct baud rate between the ESP32 and the Pixhawk.
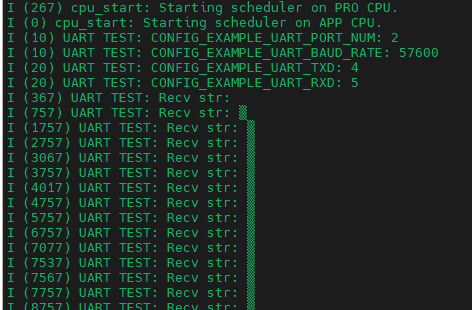
I connected the Telem2 RX TX to my esp32, powered up the pixhawk, got a 3D fix and got my ESP32 to print out what it was receiving from Telem2. Unfortunately when I printed it, I dont seem to be getting any data. It seems to just output a single byte.
If I reverse the RX TX nothing will appear on the screen.
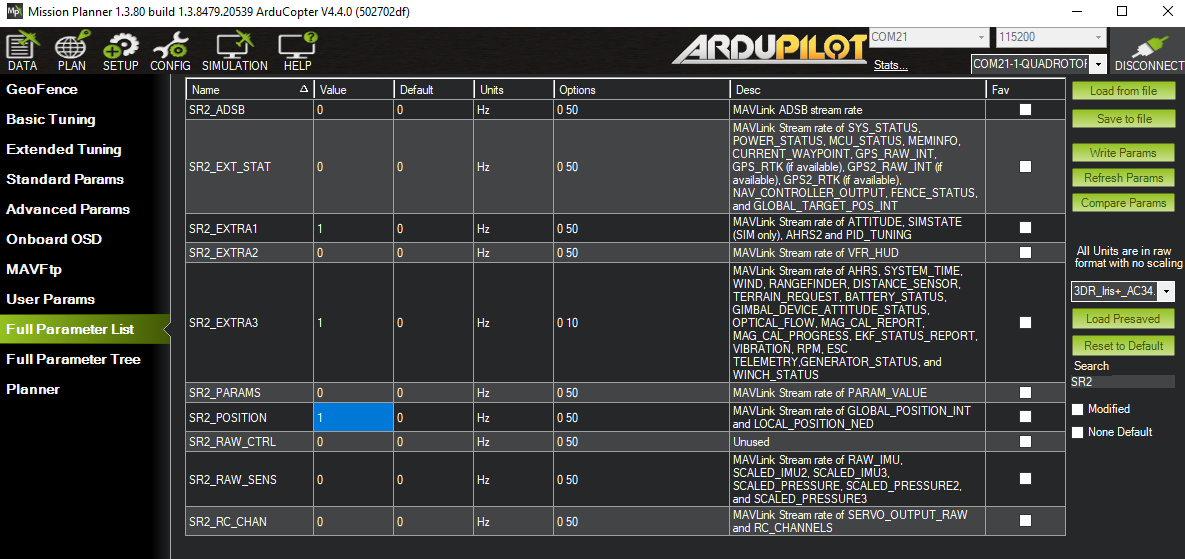
Do I need to enable the sending of telemetry messages? Or do I need to be able to arm the drone first? (I dont have the RF controller, rotors etc … with me at the moment but I can get it if I need to)
I am running the pixhawk just off the USB in order to just develop the code on the ESP32.
Any form of help or direction will be greatly appreciated, thank you!