I’m working on a MFE Believer for aerial imagery, and I’ve got a Pixhawk 4 running Ardupilot, and the Seagull #MAP2 and #SYNC2. I’m currently using the PM07 board with the (confusing for me) Pixhawk 4 I/O PWM OUT running through the PM07 FMU PWM-IN --> FMU PWM-OUT for servo control and ESC controls. I have the MAIN 1-5 (IO_CH1 - IO_CH5) fitted with these, and the BEC leg of the ESC providing 5v to the rail, leaving 3 MAIN pins open (IO_CH6 -IO_CH8). I still have the 8 pins available from the Pixhawk 4’s FMU PWM OUT(FMU_CH1- FMU_CH8), but I’m not sure how I can use these as the AUX pins, or where to assign them in mission planner. Any advice would be appreciated!
1 Like
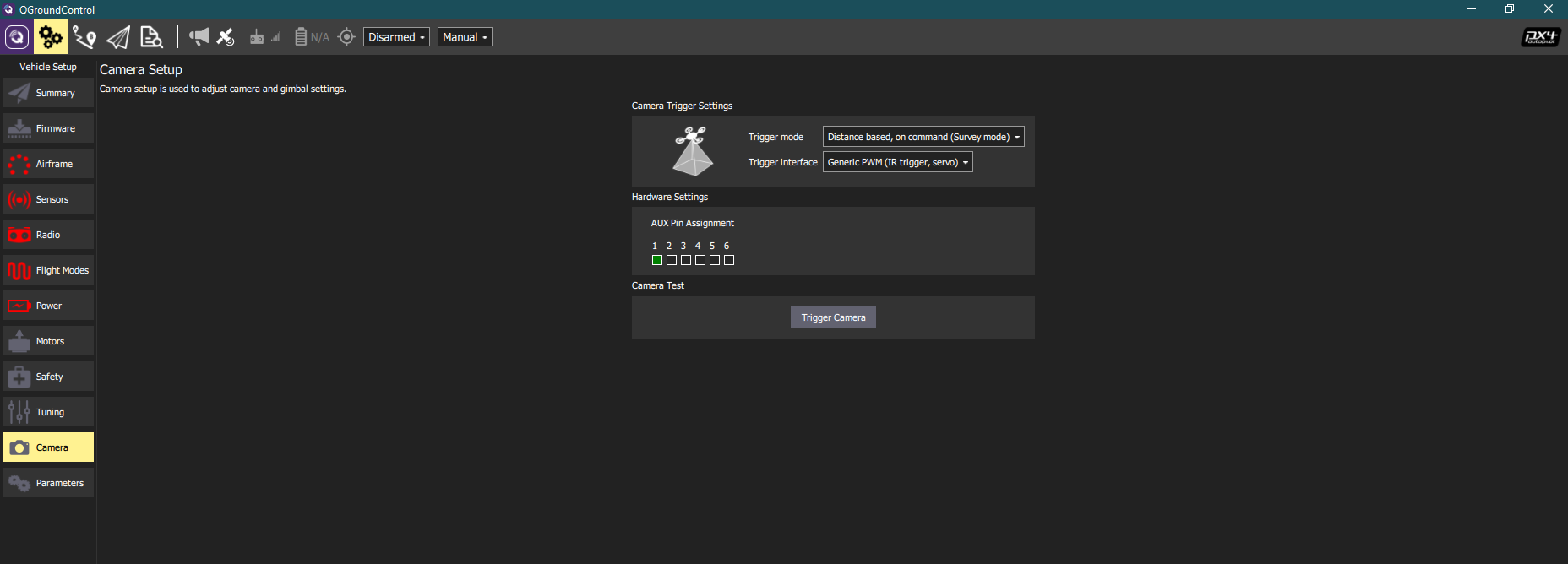
I found that running px4 on it, I can get the Seagull #Map2 working (with TRIG_PWM NEUTRAL and TRIG_PWM_SHOOT set with the correct PWM rates) like this:
The #Sync2 works as documented on PWM pin 6 (Main 6) for camera feedback on px4.
Still haven’t found a way to configure it on Ardupilot though. I’ve tried setting the BRD_PWM_COUNT to 0, so the FMU PWM OUT would be all GPIO’s as AUX1-AUX8 with no luck on the #MAP2 (the #Sync2 worked just fine though). I’ve also set BRD_PWM_COUNT to 1 , which should turn AUX1 into SERVO9, leaving AUX2-AUX8 as the FMU GPIO pins, with the same results (I did test the full range of BRD_PWM_COUNT 0-8). In addition, I’ve tried running it on SERVO6-SERVO8, and it doesn’t respond to the camera trigger command in mission planner, and the PWM rates don’t change.
Still working on it.
I’ve started to suspect that it’s a firmware issue. There seems to be no PWM when using servos on the FMU side of the pixhawk 4. Servo Raw for SERVO9 doesn’t change from 0. There’s also the wierd feed from SERVO13 (which should be AUX5) showing a PWM rate of ~25000. 