I’ve got a friend who is flying a quad copter with Pixhawk running 3.4.3. Recently the copter has had issues flying in any GPS enabled mode (Loiter/Auto). When he switches to AUTO, the copter begins to do the flight properly but along the mission seems to lose orientation and cannot fly the pre-programmed route properly. At points it stops and waits while in Auto as if trying to figure out where to go next. I believe it is an issue with the GPS/Compass module (from 3DR). Could someone please look at the attached log and let me know what they see? If you plot the flight in KML you can see that the copter doesn’t quite make it to the way-points and overshoots the flight lines. From what I see in the log, everything looks good but I’m not an expert.
studenblume, finally figured out how to upload it. The link to the file is now in the original opening question as well as in one of my comments/replies
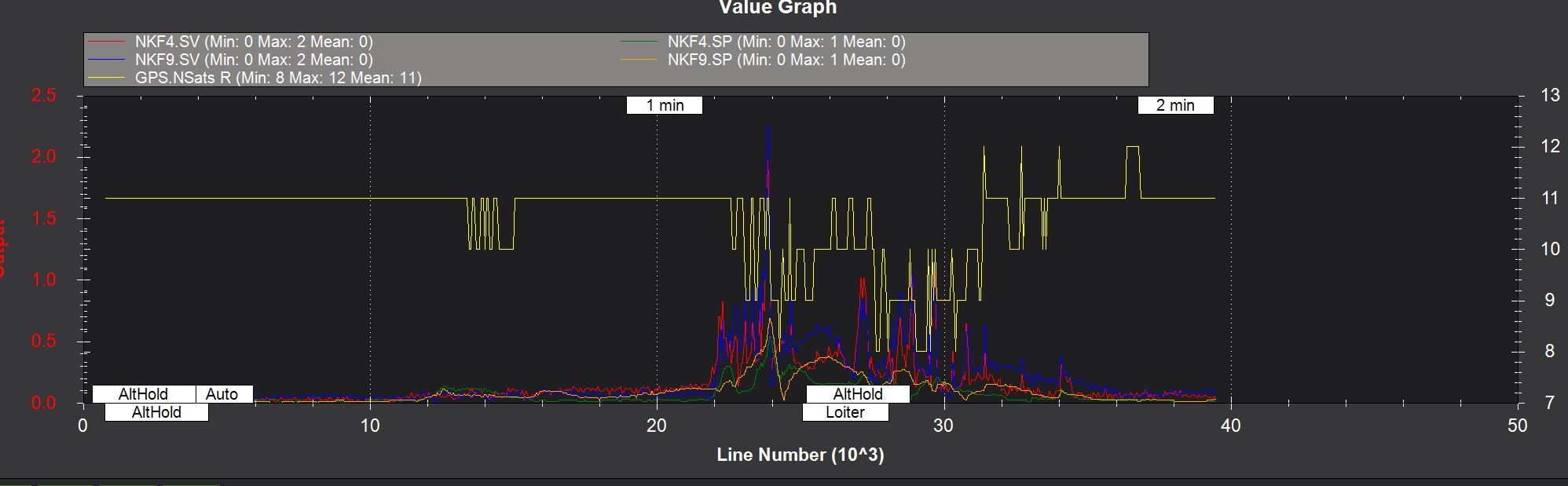
It does look like the GPS velocity and position estimates become an issue after about a minute in. http://ardupilot.org/dev/docs/extended-kalman-filter.html#extended-kalman-filter-interpreting-log-data
says that when EKF4 SV peaks over 1.0, the filter is not using the gps velocity data. The number of sats reported does dip in that area as well. I’m not sure if that’s repeatable, but maybe local GPS interference?