I’m confused about the pinout description of the Telem1/2 UART port on Pixhawk 2. The documentation says
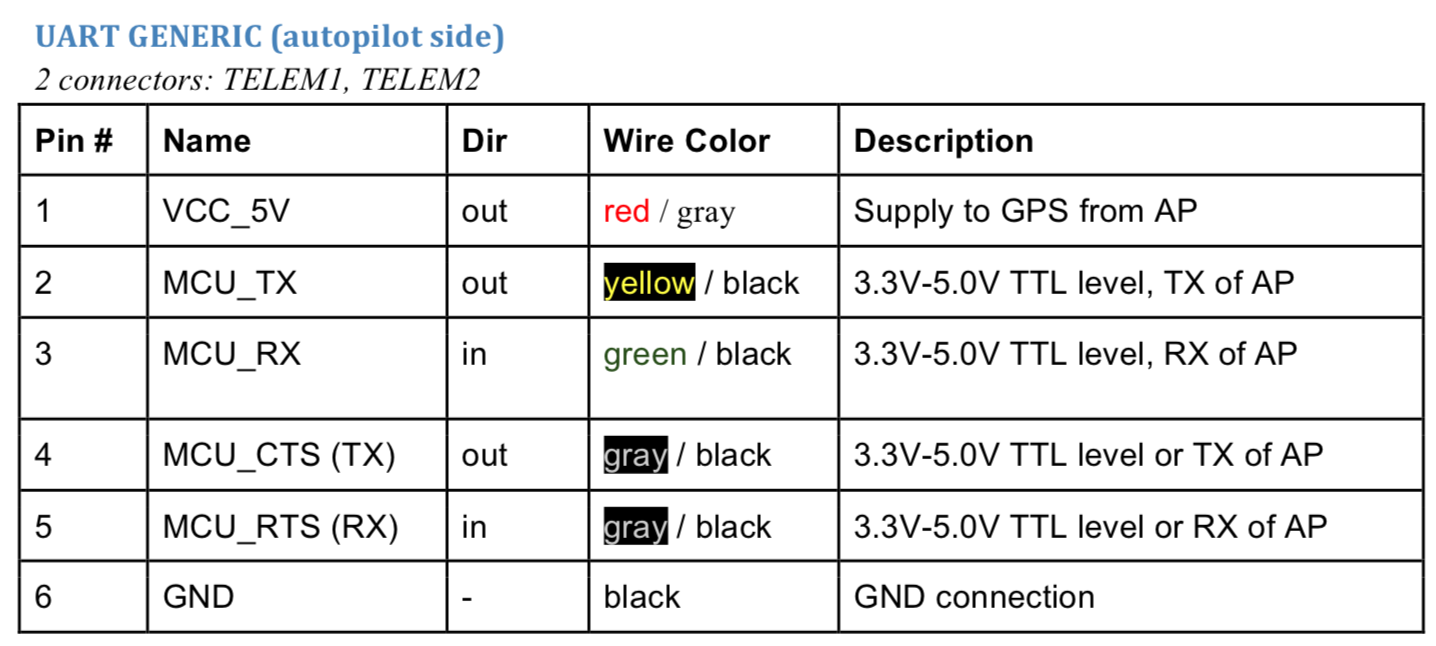
From the perspective of the Pixhawk, should CTS not be Rx / in? Same for RTS… (should be TX/out)…?
Or is the direction correct but RTS/CTS pin function mixed up?
On same note, how would one verify end-to-end HW flow control in a setup with PH2.1 with arducopter, a modem link with HW flow control, and a GCS with MissionPlanner?
Thanks much in advance,
gj