So i’ve bought a cheap 4 wheel unencoded 12v 300rpm Rover of of AliExpress and a Sabertooth 2x12 motor driver. But i’m running into some issues. The problem is that i can’t seem to get the motors to turn properly to the point that i don’t have any control what so ever over the direction and speed.
Sabertooth DIP switches set to
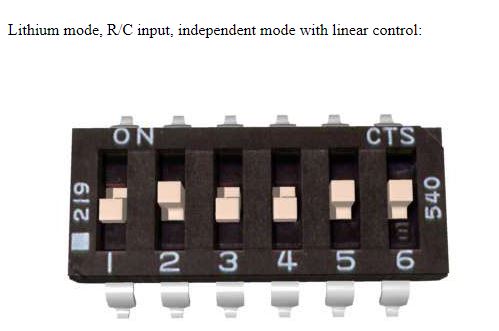
DOWN/UP/DOWN/DOWN/UP/UP according to this link
MOT_PWM_TYPE set to 4 for BrushedBiPolar
SERVO1_FUNCTION = 73 (Throttle Left)
[SERVO3_FUNCTION = 74 (Throttle Right)
RCMAP_ROLL = 1
RCMAP_THROTTLE = 2
RCMAP_PITCH = 3
BRD_SAFETYENABLE = 0
ARMING_CHECK = 0
So when i arm the Pixhawk the right side of the Rover starts spinning. (full speed) Moving the right stick in different directions results in erratic behavior. Sometimes it slows down, then full speed again. Left side doesn’t do anything at all most of the time and suddenly jumps into life also spinning at full speed. Looking at the servo output in MIssion Planner everything seems to be OK. PWM values corresponding to stick inputs of the transmitter.
In an attempt to troubleshoot what is going on disconnected the Pixhawk and connected the Sabertooth directly to the receiver. Channel 1 and 2. Basically the same result. Both sides go to full speed instantly and don’t seem to respond to stick input.
So i’m at a loss here. Starting to think the Sabertooth is broken.
If anyone has any ideas on howto resolve this / confirm that the Sabertooth is broken. Please feel free to respond. Any help is appreciated.
Both motors are responsive, so that’s good news. Make sure you select “Independent Mode” in the Dimension Engineering wizard, the Pixhawk is already mixing throttle and steering commands. If you select mixed mode in the wizard, the Sabertooth will re-mix those commands again. This can result in the chaotic behavior you’re describing.
The DIP switches are set to the positions described (and shown) above.
DOWN/UP/DOWN/DOWN/UP/UP
Some additional information:
When directly connected to RC receiver (FlySky FS-IA6B) to channels 1 and 2 nothing happens. Right stick to left right up and down. No response from the motors.
When connected to the Pixhawk after arming. Right side motors spin up directly. Left motors nothing. But i did notice something weird. In Mission Planner under Servo Output after arming the values went from 1500 (neutral) to 1600-1900 for the right motor and 1100-1500 for the left motor. No stick inputs from the transmitter. Under Radio Calibration i can verify that there are no stick inputs. Throttle/Roll stay at 1500
I don’t know if this helps but I have similar problems with one of my Syren 25 controllers (also from Dimension Engineering).
We have one for each wheel. One works OK, the other has incoherent behavior similar to yours. I have removed it from our rover and spent some time bench testing it and have been able to reproduce some of the problems.
However I haven’t been able to nail down the inconsistent starting and stopping under RC control when in the rover. I thought it might be a low voltage cut out but haven’t been able to find out what the factory setting is; but I don’t seem to get much voltage droop under load in the rover anyway.
We have the luxury of having two units to compare and so it seems that one is faulty. I am about to see if I can return it hoping that I am believed that this unit exhibited this from new and that it isn’t me that has burned it.
Looking at your outline I reckon yours might be faulty as well.
yeah, i’m starting to think mine is broken. Nothing seems to help. Rewired the whole thing and am only using the RC receiver at the moment. No Pixhawk. Same issue every time. Spins up, never spins down. No control over forward and reverse. Going to contact the supplier, this can’t be how it’s supposed to work.
That guy has the same controller, wired up the same way where he get’s it to work properly and mine does not.
I wonder why these controllers are so popular? I have used Brushed ESC’s for RC trucks on all the Rovers I have built. Price is good, most are waterproof and I have never had one fail. Perhaps for other applications without a Flight Controller or a need for regen braking, or?
Because it was the recommended setup advised by the Ardurover wiki.
Didn’t need a full size Sabertooth. The ‘little’ one would suffice. But like Bill_K noted, most likely the unit is broken. Already informed the supplier to sent me a new one.
Hi Drew-I’ve used Hobbywing Quicruns on a couple vehicles. 3S at 60-80A depending on model. They had a dual ESC that would be handy for skid steer but I’m not sure if they still make that.
Dave, the Sabertooth is OK up to 33.6 volts so is good for 24v lead acid battery systems. I think we would need an ESC rated to 6S (?) for this situation and when I looked I couldn’t find one that was cheap or had the functionality of the Sabertooth.
I am not much of an expert in finding stuff and so I would be really interested if anyone could point me to any candidates.
As an aside we have swapped to a RoboClaw and while similarly expensive, so far has been good to work with.
Hi Bill-That’s a good point as the RC truck ESC’s are typically 3S or 4S max. There may be 6S capable version but they would likely be expensive kind of defeating the purpose of using this type in the 1st place. Thanks for the info!