I build a S550 drone with Pixhawk 2.4.8(unbranded one)[The Firmware version of the FC is fmuv3 4.4.4
] and Now my drone flips at take off. The motor order is correct and I can clearly see one side of the drone don’t get enough thrust than the other.Please help me with this
here is the last .bin file
and I went through auto analysis in Mission Planner and the result was as below
Log File C:\Users\senur\AppData\Local\Temp\tmp1065.tmp.log
Size (kb) 145.27734375
No of lines 2536
Duration 0:00:01
Vehicletype ArduCopter
Firmware Version VDD_5V_PERIPH_n
Firmware Hash db53a28f
Hardware Type
Free Mem 0
Skipped Lines 156
Test: Autotune = UNKNOWN - No ATUN log data
Test: Brownout = GOOD -
Test: Compass = FAIL - WARN: Large compass offset params (X:424.43, Y:85.16, Z:200.48)
WARN: Large compass offset in MAG data (X:424.00, Y:85.00, Z:200.00)
Large change in mag_field (7542.62%)
Min mag field length (5.00) < recommended (120.00)
Test: Dupe Log Data = GOOD -
Test: Empty = FAIL - Empty log? Throttle never above 20%
Test: Event/Failsafe = GOOD -
Test: GPS = GOOD -
Test: IMU Mismatch = NA -
Test: Motor Balance = UNKNOWN - ‘HEXA/X’
Test: NaNs = FAIL - Found NaN in CTUN.DSAlt
Test: OpticalFlow = FAIL - ‘FLOW_FXSCALER’ not found
Test: Parameters = FAIL - ‘MAG_ENABLE’ not found
Test: PM = UNKNOWN - No PM log data
Test: Pitch/Roll = GOOD -
Test: Thrust = GOOD -
Test: VCC = UNKNOWN - No CURR log data.
The other componenets that I’m using are
Sunnysky 2212 980kv motor
40A skywalker XRotor ESC
5000mah 3s battery
Tx Flysky fs i6s.
I don’t use any telemetry module.
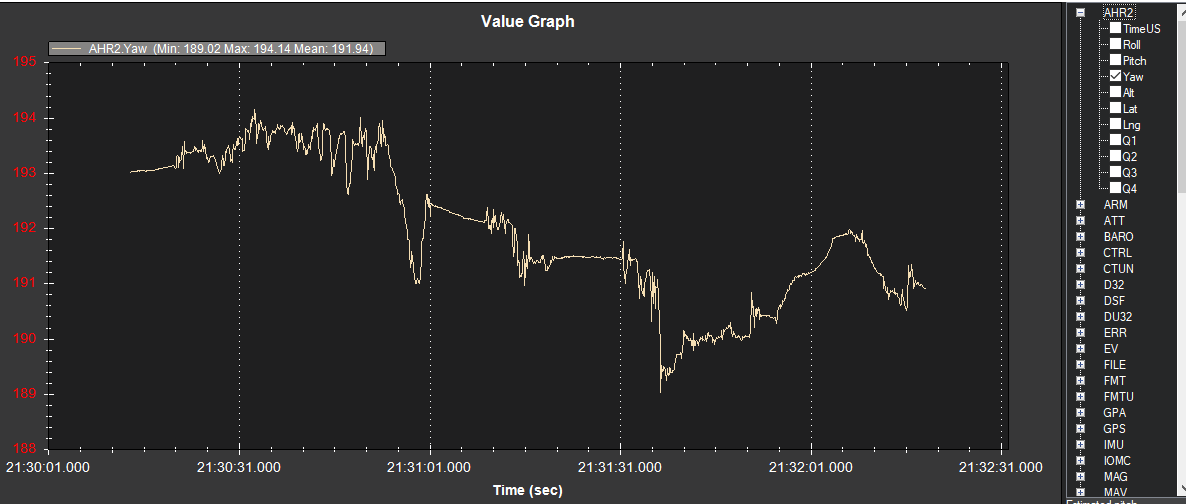
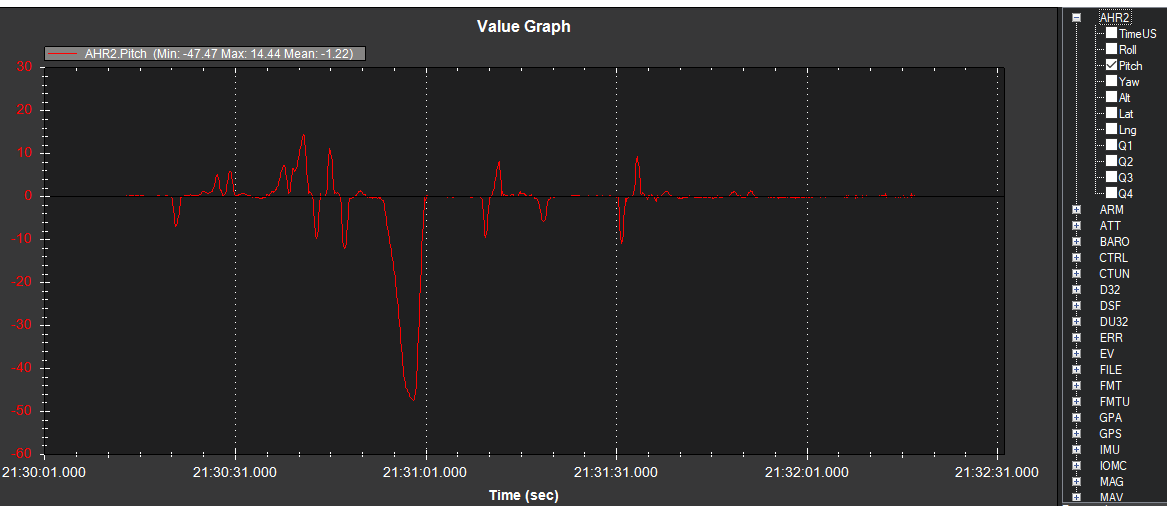
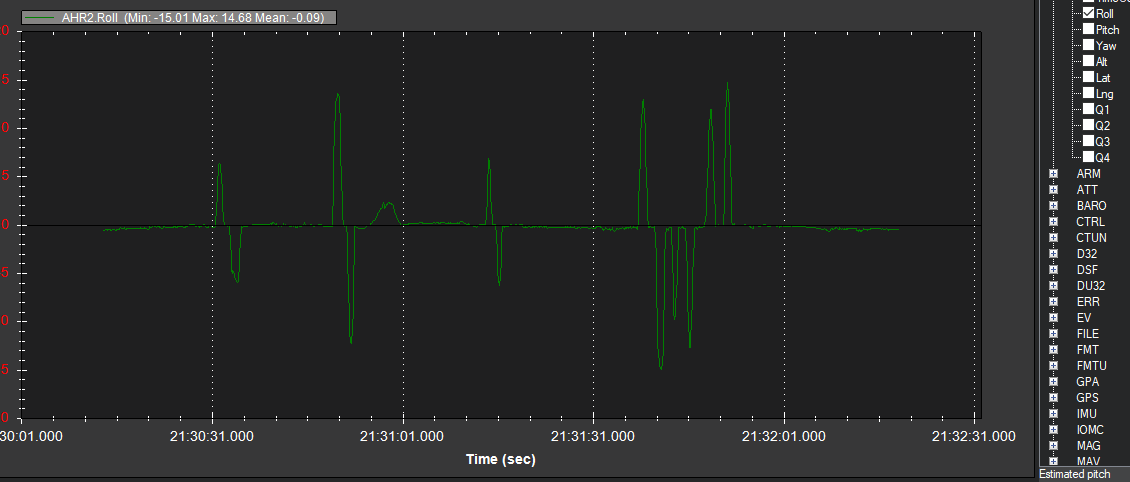
And also I need some advices to setup MOT_SPIN_ARM, MOT_SPIN_MIN, MOT_SPIN_MAX parameters also. And my internal compass is showing and error so I had to disable it.My external compass is UBLOX M8N GPS.As I said before when take off my drone flips and I can clearly see the thrust generating in one side of the frame is lower than the other. And also I would like to know the difference between HEXA X and HEXA CW X frame beacuse my esc wiring is according t HEXA X frame. The Firmware version of the FC is fmuv3 4.4.4
Please Help me with this.