hi, created my first hexacopter, with pixhawk 2.4.8 the hexacopter is yawing when try to takeoff, i dont know if it is due to transmitter senstivity or some error with the pixhawk calibration, i am using fly sky fs i6s, self center stick the logs files are attached could anyone tell why this issue, the motors are spinning correctly checked properly, config is hexa x 2023-08-09 19-02-28.bin - Google Drive
Do the RC calibration again.
The RC4_TRIM is 1596 which is meant to be the centre position, but centre of the MIN and MAX would be about 1500.
Also check your prop rotations with MissionPlanner motor test, Just to be sure. Hexacopters are a little tricky if you are used to Quads.
1 Like
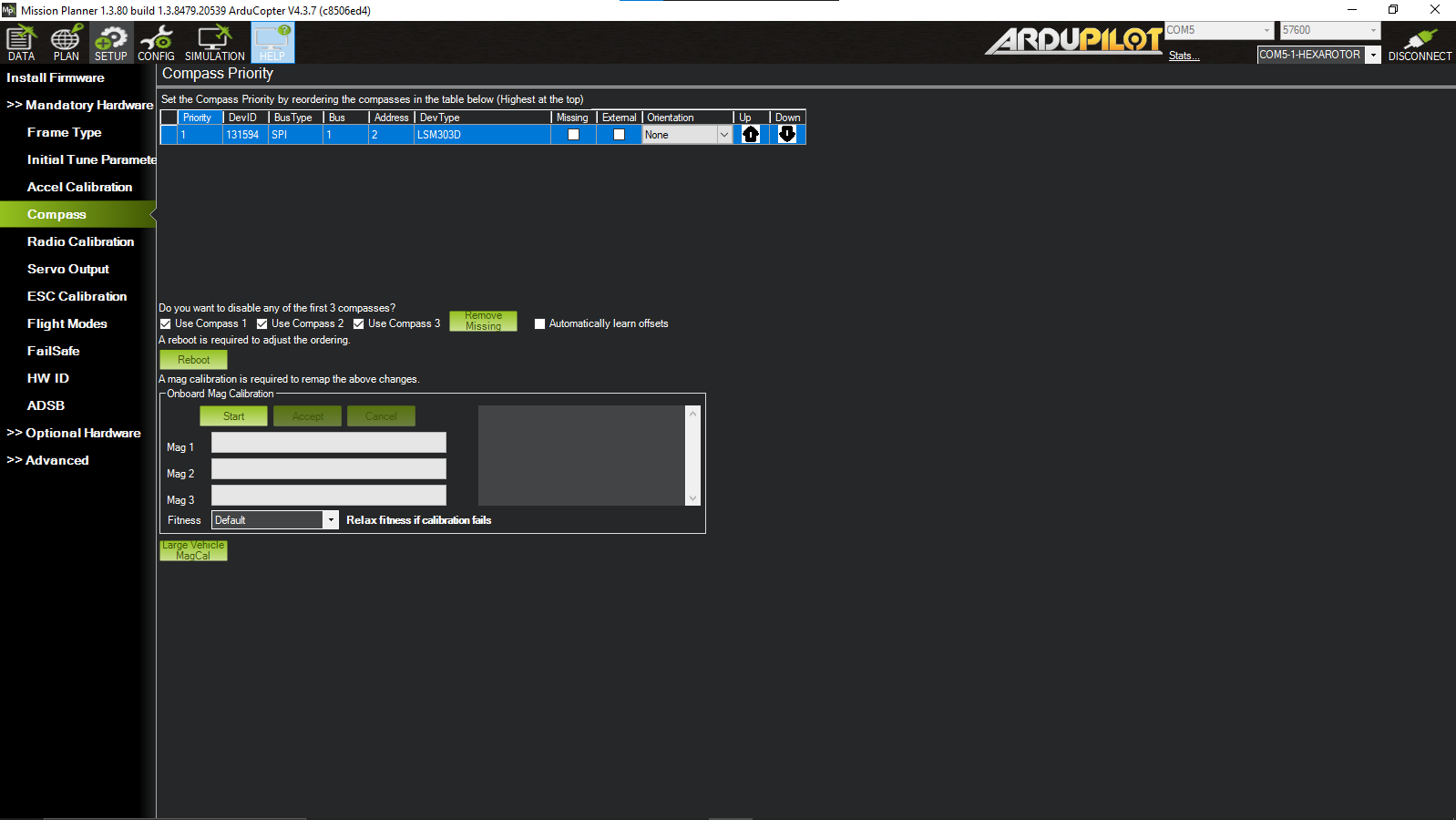
ok, i didnt knew about this position number, i checked the motors, i also had error EKF3 IMU0 MAG0 ground mag anomaly, yaw re-aligned, i am very confused why is it not working also altitude hold is not working, when in stable mode my front should be at front but it starts to rotate slowly, too much difficulty in flying i am a newbie to ardupilot and rc so i am not getting how to calibrate things and troubleshoot, one more addition in my mission planner when i hooked external compass that is only showing no internal compass is there (ss uploaded) also is there any way the yaw control could be turned off or disarmed from the throttle control, is this yawing due to control issue with transmitter, fs i6s?
Did you redo the RC calibration?
If you can supply a .bin log file of the test flight that would help - are you Ok with doing that?
“ground mag anomaly, yaw re-aligned” is not a major problem, this can be sorted out in time.
1 Like
hi, have you solved this one?