Hi,
as it states in the Headline I’ve got some problems with the Baro of my Pixhawk.
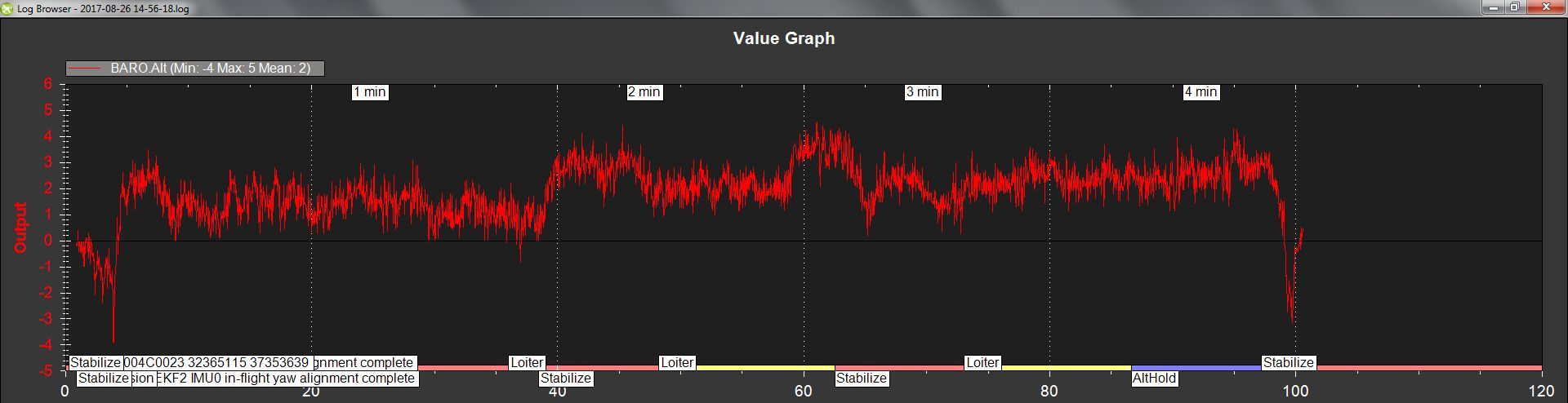
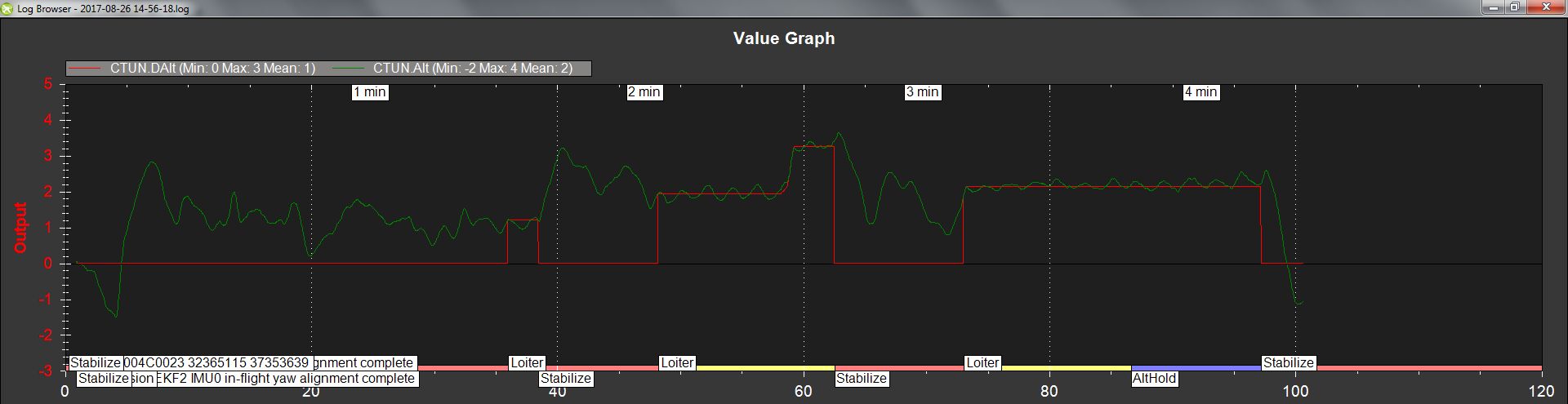
While some normal flights I noticed that the Copter is unable to hold a specific altiutde. It’s has some fluctuation up and down.
So I’ve looked in some logs and Yes I think this Behaviour of the Baro isn’t Normal:
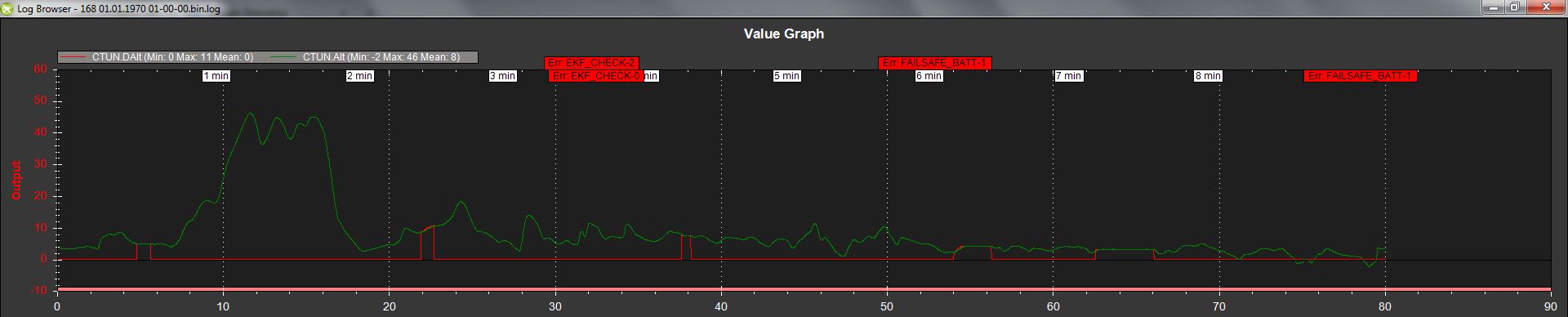
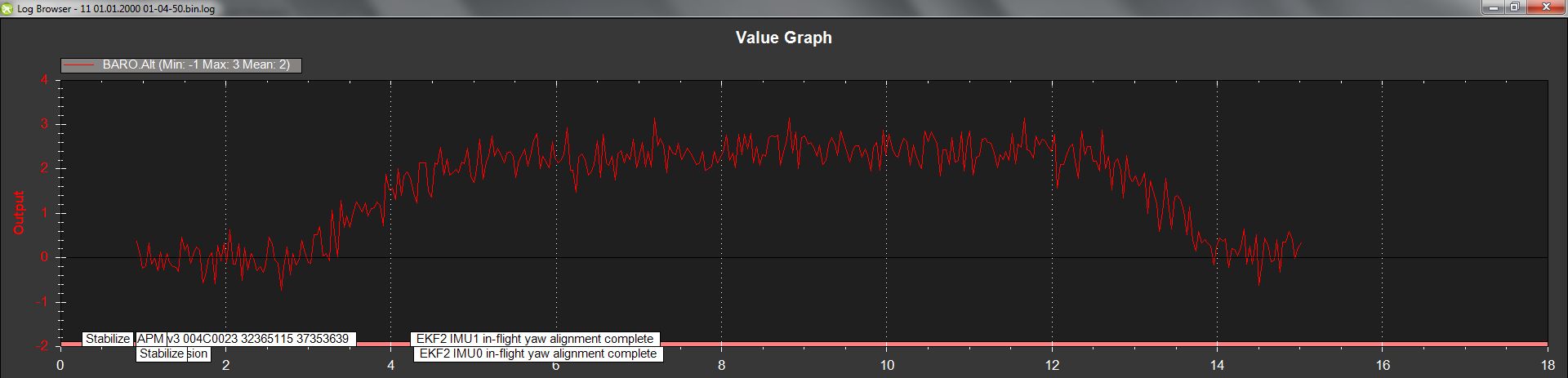
So what could be the cause? I’ve read somewhere that Vibrations or/and the Wind flow inside the Case is an Issue, but look what happens as I Spin the Motors without Propellers lifting it 1-2m in the air. It’s better but still bad:
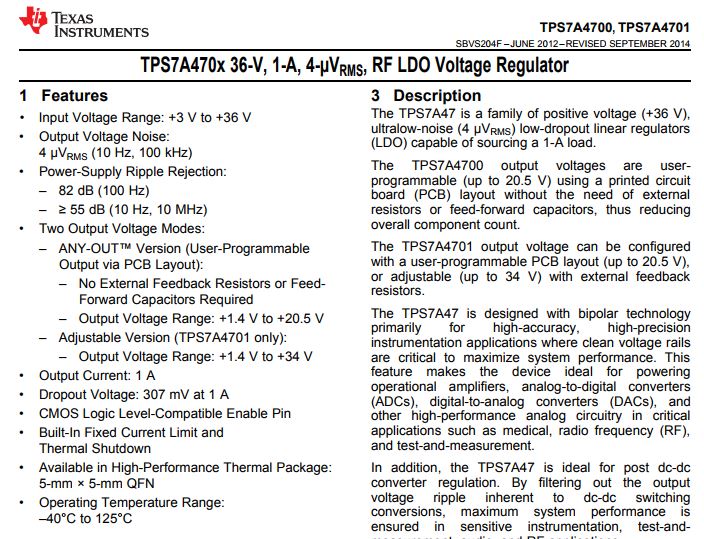
Beside good quality foam and wind insulation, a clean dc power supply to the FC is an advantage.
Cost is low and advantage numerous.
LDO dc voltage regulator for small required power such as FC, Rx, GPS/Compass do marvel
By the way removing noise from the source is good, having virtually none by using a separate small 2S battery for the electronics and opto isolated ESC is even better. (No common ground between sensitive electronics and very noisy switching ESC).