I’ve seen and read discussions about this issue and feel like I’m just hitting a wall, maybe I’m missing something, I’m very new to all of this.
Pixhawk 2.4.8
FArducopter 4.0.4 recent update
35a BLHeli_32 ESC
I can’t get the current version of BLHeli_32 to read my ESC’s. It connects but when I do “read setup” it comes back with the “no valid ESC configuration”. I’ve checked multiple posts on parameters
Thinking I have all that right as BLHeli does connect. Most recent thing I tried switching motor output to “Aux” (moving motor connectors on my Pixhawk). When I did this, it still didn’t connect to my ESC’s. When I put my motors on “Main” I can motor-test just fine via MissionPlanner but still can’t get BLHeli to read my ESC’s. I have 2 motors turning the wrong direction and need to change direction via BLHeli unless someone has a different way for me to do that?
I even found posts that suggested trying an older version of BLHeli_32 but that didn’t help either.
Hmmmm…thinking that RCOut: shouldn’t be blank? Also wondering if after switching to use the AUX pins I need to adjust another parameter I haven’t read about yet?
I knew I was missing something but didn’t know what. I had my ESC’s on AUX 1-4 but hadn’t switched my parameters to show motors on those servo channels. I felt kind of silly in the end, I had actually watched a video that talked about changing those settings but somehow missed the significance of it until after reading more on here. After I did that I was able to get everything connected through BLHeli, got the motors reversed, changed colors on the LED’s and started some basic flying to see how it does…
Now I get to go to the portion of the forum that talks about settings, trim and stabilizing as I’m not quite there yet…
PS - already had to fish it out of a tree and repair a weld…
Hi PeregrineFalcon glad you have solved your problem. Iam realy new to this have same problem …
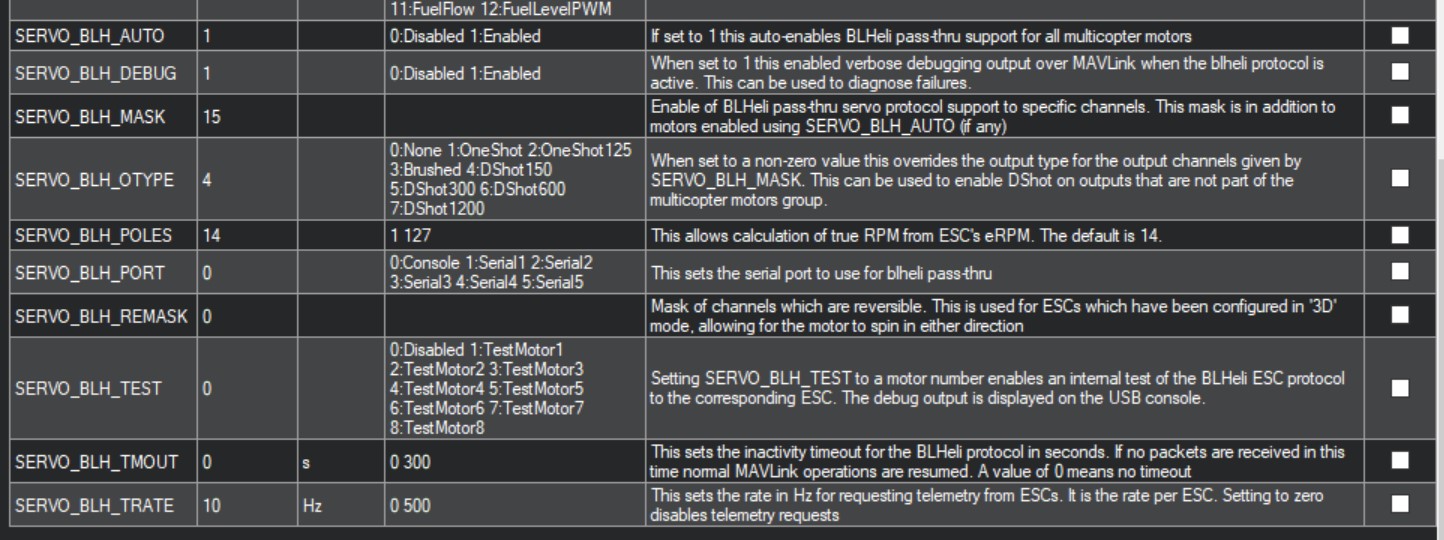
can you please send or post your setttings that need to be changed.