I am using this method. [Reason why is it’s a Rover - I want RC transmitter only controling for shifting and locking diffs etc. - Then the Pixhawk can controller throttle steering ]
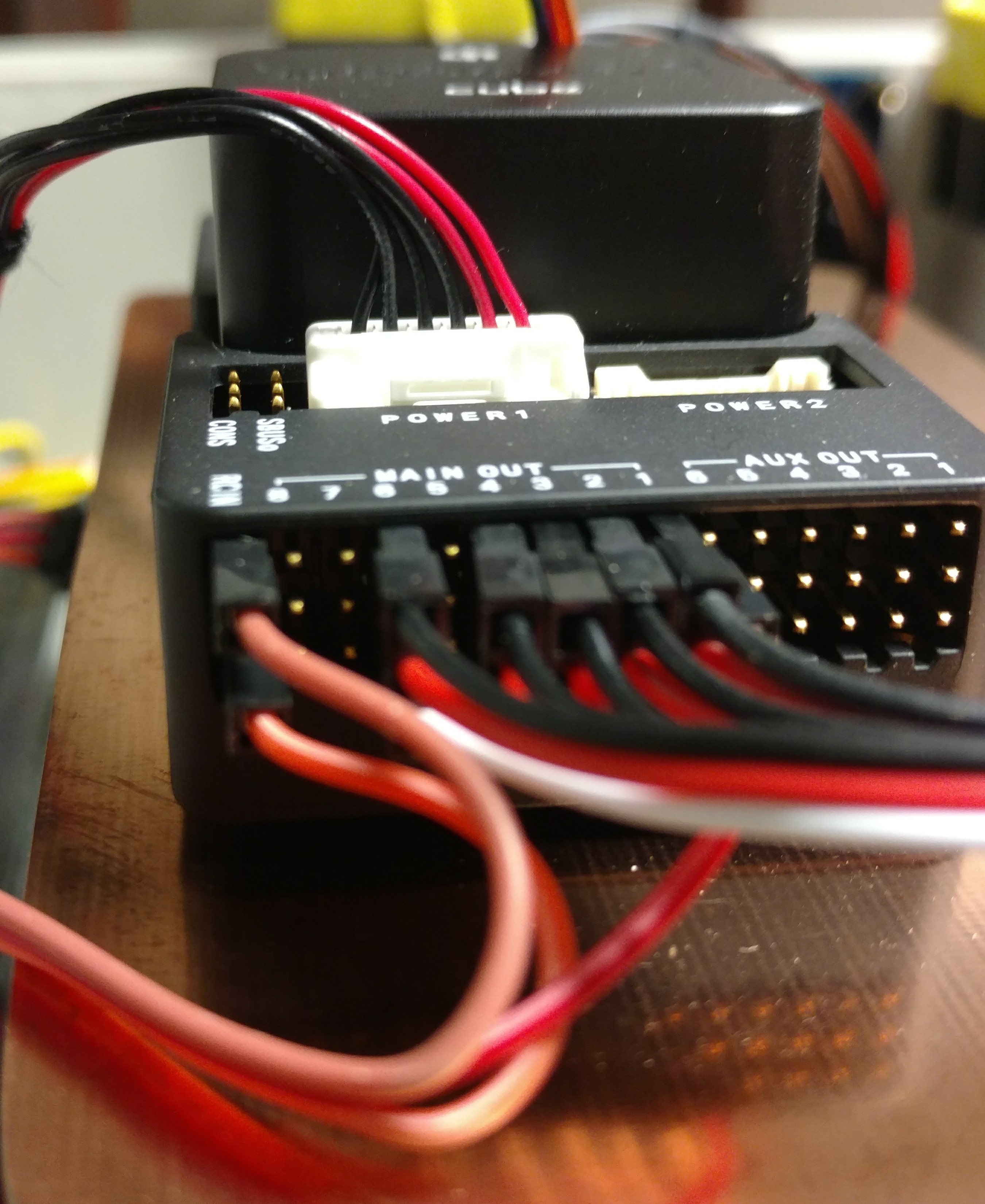
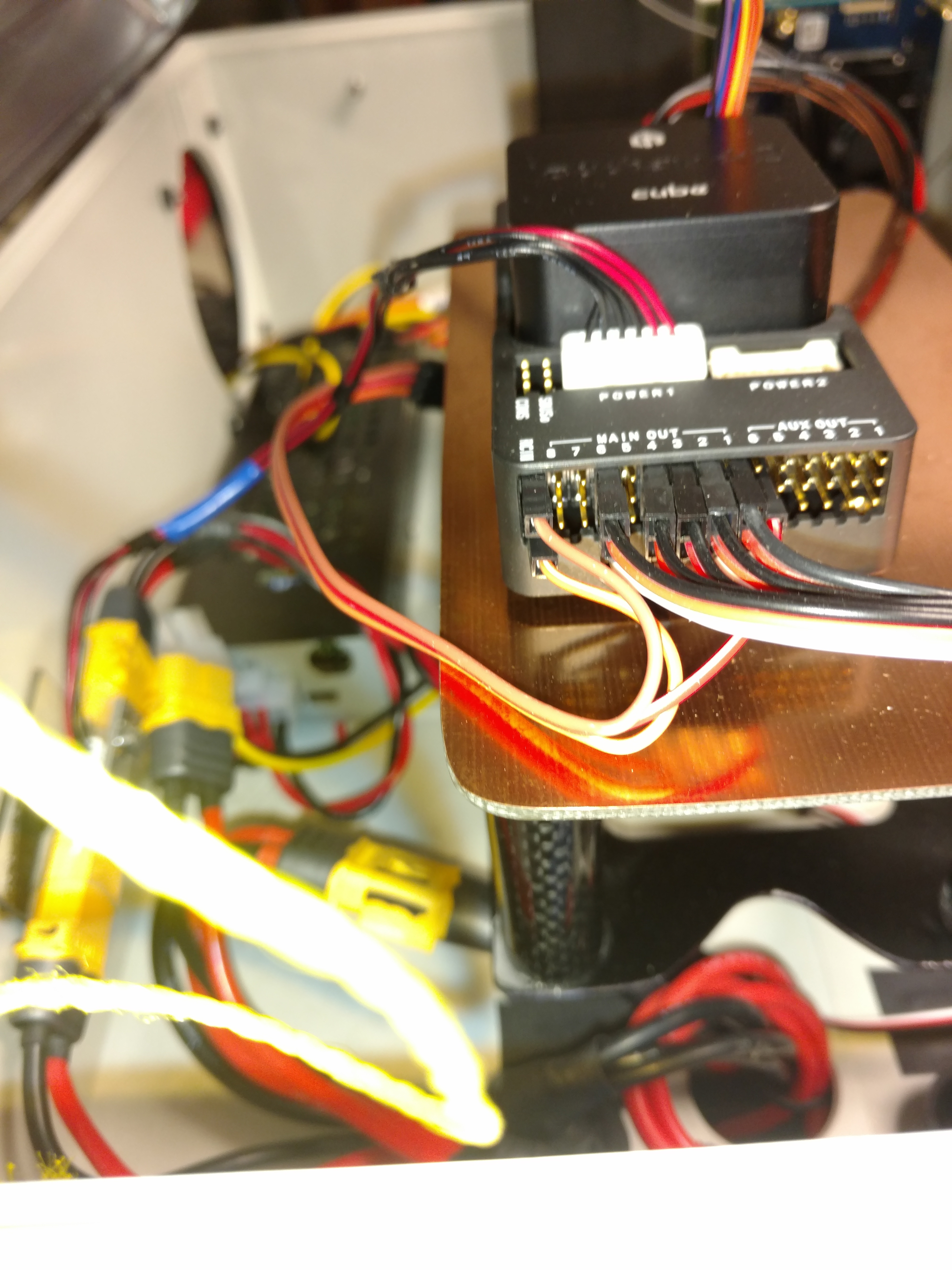
From PH2.1 RC in (that also supply’s a ~5v out hence giving power to the servo rail on your reciever ) Just unplug the ~5v RC in lead and pull it out to your ph2.1 servo rail that is powered by your battery ESC or Bec. Now the reciever is powered by your battery etc. Instead of the RC out. Someone correct me if I’m wrong but you just need signal and ground from RC in- I don’t know about the little ground loop you create (ground from Pixhawk touching ground from ESC battery or bec at the reciever could end up with different potentials?)