I am using this method. [Reason why is it’s a Rover - I want RC transmitter only controling for shifting and locking diffs etc. - Then the Pixhawk can controller throttle steering ]
From PH2.1 RC in (that also supply’s a ~5v out hence giving power to the servo rail on your reciever ) Just unplug the ~5v RC in lead and pull it out to your ph2.1 servo rail that is powered by your battery ESC or Bec. Now the reciever is powered by your battery etc. Instead of the RC out. Someone correct me if I’m wrong but you just need signal and ground from RC in- I don’t know about the little ground loop you create (ground from Pixhawk touching ground from ESC battery or bec at the reciever could end up with different potentials?)
Can you power the servo rail via the S.Bus port? On the Pixhawk 1 you could and I’ve been trying to figure out if its possible so I don’t have to waste a servo channel.
There’s this mention in the Pixhawk 2.1 specifications guide:
“S.Bus and CPPM receivers powered directly from the servo rail, and must support the servo supply voltage.”
Try a continuity test both ways (to make sure there is no diode). If it checks out you are likely ok unless the track on the PCB is tiny and you have lots of hefty servos.
Confirmed, the S.Bus works fine to power the servo rail.
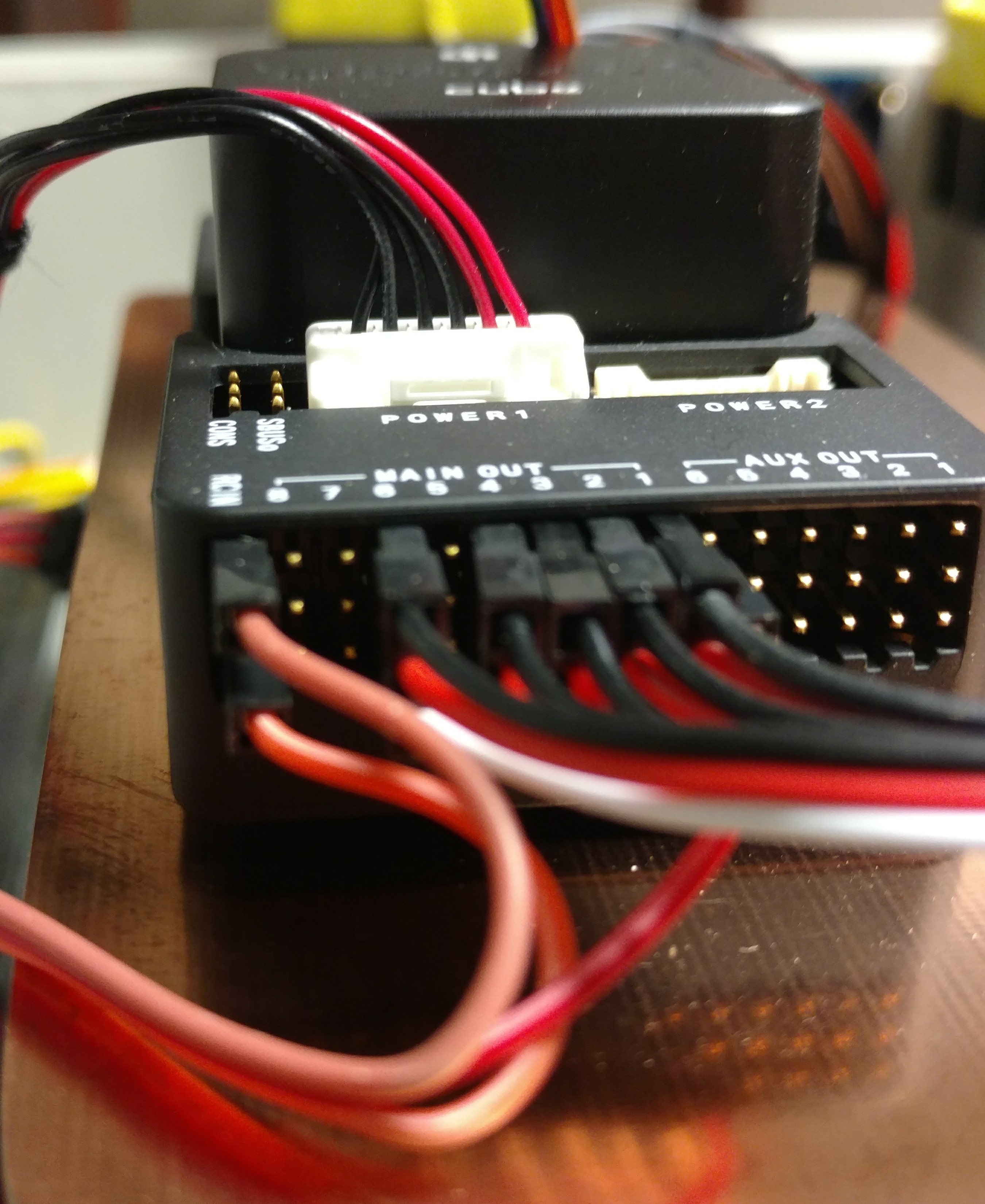
Have I understood this rail right… Only Pixhawk 2.1 + Receiver connected to RC IN. I have tested the following different ways:
- Connecting USB… powers up the Pixhawk and the Receiver. Rail 0 volts
- Connecting power to Power 1… powers up the Pixhawk and the Receiver. Rail 0 volts
- Connecting power from an UBEC to the rail… powers up the Carrier board (not the Cube) and the Receiver (fully manual flight) and the rail
Right?
I also use Backup-power to Power 2-port, but havent tested with that BEC.
But… what happens if both Power 1 and Power 2 dies and the rail is powered from the UBEC… and I am using a V-tail configuration in Mission Planner for my Believer… manual flight in this case (Carrier board powered, not the cube, no auto)… what happens? I using aileron, elevator, throttle and rudder from the receiver.