Awesome.
You probably know this, but the Pi only has one proper uart, plus a mini uart that usually defaults to console. I’d suggest using the full uart for connecting to the Cube, and leaving the other as console.
With USB, including a mini hub would be great: even though there’s only one bus, would be convenient to be able to attach multiple devices easily
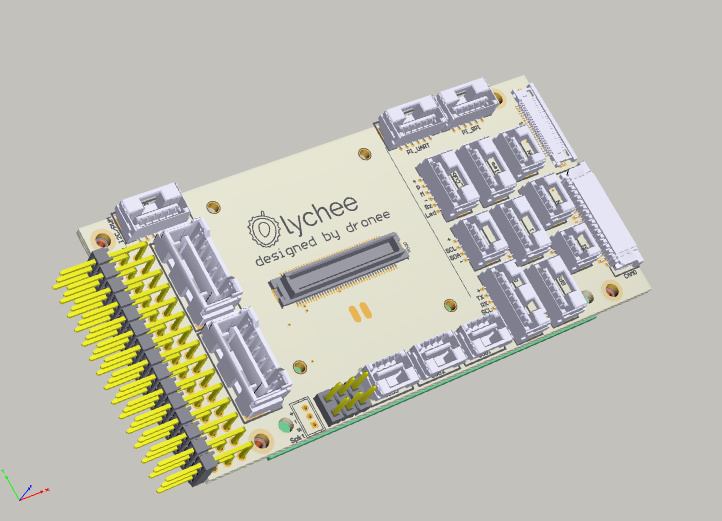
DroneePilot is all in one design perfect for drone products.
In this new carrier board i will keep the origional Cube carrierboard design and will add RPI which i think more flexible from developers point , and will keep the price down , as it doesnt have expensive sensor, module on the PCB.
To access the RPI’s shell good to have wifi on board. I am planning to add normal USB port as well to attach small usb dongle . I think it will be more convenent than makeing external converter with cable. What do you think, is it better to have normal USB plug as well or all USB outs with standart dronecode plug?
The jst-gh is much better for permanently connected peripherals, but having a normal USB host socket would be useful for setup.
What I’ve done previously is solder an I2C expansion hub to USB pads, as I don’t trust a normal USB connector in flight.
Usb connector not for flight , definitelly. Although, from developer point of view would be easier to attach small usb dongle directly to the board. Also USB connector is too big. I am stuck a little bit to add or not. I have already add usb splitter chip, will be 3 usb out.
Hi Artem, that looks very interesting. Some quick questions -
Will i be able to connect to the RPI3 via Wifi?
Will the Rpi3 compute module be integrated? or will I have to install it myself like with the edison?
Where will the SD card slot be? I have major diffficulties taking the SD card out in the Cube with the original carrier board as the SD card is on the side. In a plane, It makes the design very inaccessible. the original Pixhawk 1 had a nice, easy to access SD card slot in the front. I could Easily open the caonpy and access it in my plane.