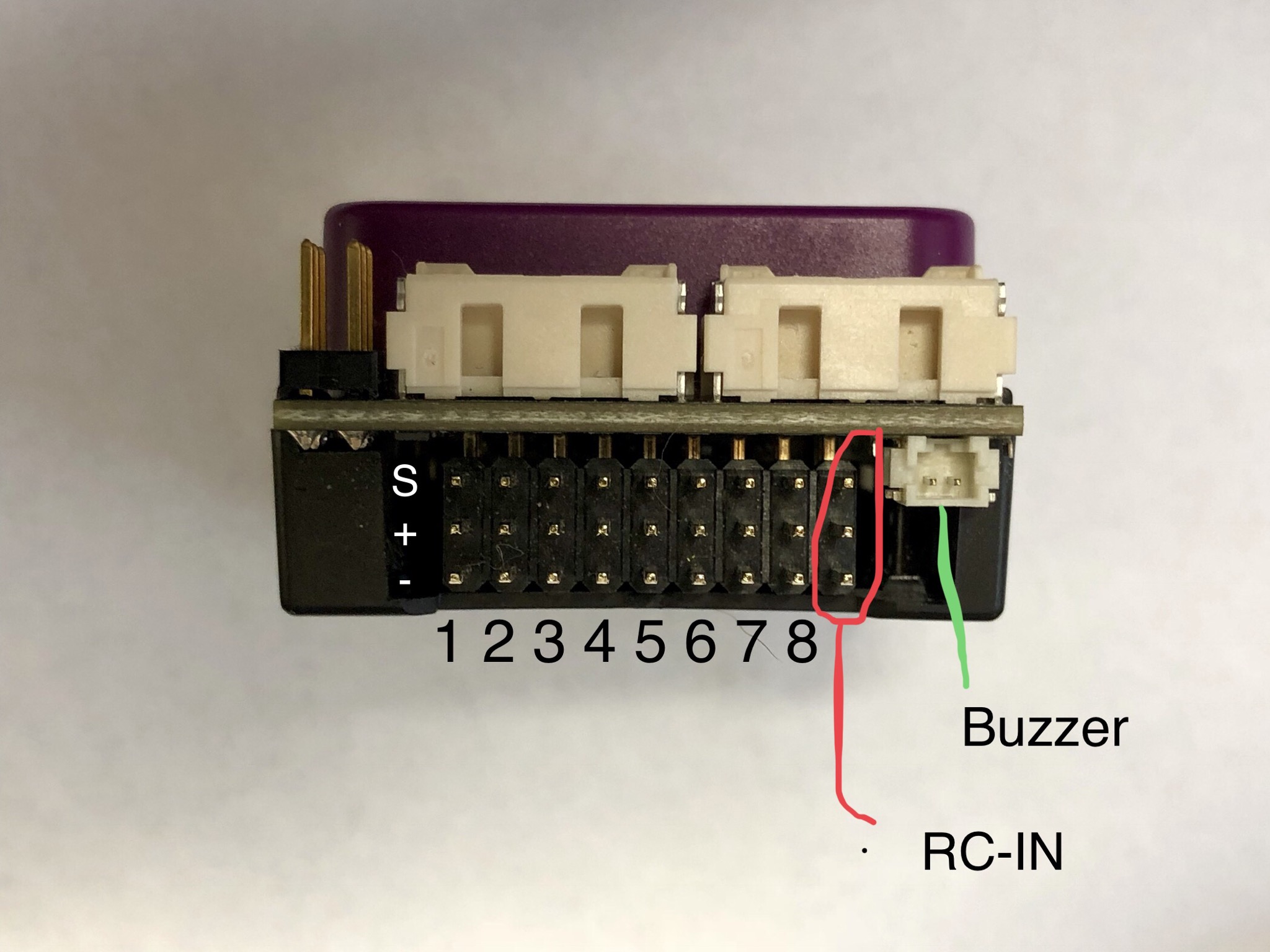
Because the Pinout is not the same. The servo rail is opposite of what it is in the larger board. I would like a clear and concise diagram to go off of. I don’t think I’m asking to much when I ask for a diagram that is representative to the board that I am working with.
The first batch is the pre-release.
The full bells and whistles version is coming.
Feel free to apply the knowledge you have learned on the pre-release to the wiki! It would be much appreciated


can I use the old cube (pixhawk 2) of the solo?
great question I have 2 of these kicking around would be great to put them to use!!
…same here, would be great to reuse those Solo cubes
I think your answer can be found here: http://ardupilot.org/copter/docs/solo_arducopter_upgrade.html
It should work.
The biggest difference i can see is the 5V signal voltage levels on PWM, and (almost) all hobby esc’s and servo’s can cope with 5v… (once you flash it with a normal arducopter version.)
Also: https://madsrc.com/2018/12/07/pixhawk-2-1-aka-the-cube-versions-explained/
If your really worried about the 5v levels, you could put a level shifter 5v to 3.3v in between.
Only the green cube has 5.0V pwm, the solo black (2.0) has 3.3v
The only real issue on the solo black cubes are as follows
- Old sensors (not a big deal)
- No heater
- The PPM / S.Bus input has a ringing issue if your cable from your RX to the cube is too long. Keep it as short as possible
- The first 10000 solo cubes (plastic top black 2.0) had a hardware issue that meant that the IMU3 becomes unstable if the screw at the bottom left is done up… leave it out… only use three screws. ( bottom left is when you look at the cube from the connector side, and the USB/SD is up)
1 Like
Hi,
I just got the mini cube(purple) and mini carrier board today. Since the latest arducopter firmware 3.6.5 support this hardware, I tried to load firmware but never succeeded. Any suggestion to solve this problem?
When the message window appears Linux board --> selected NO.
Thank you
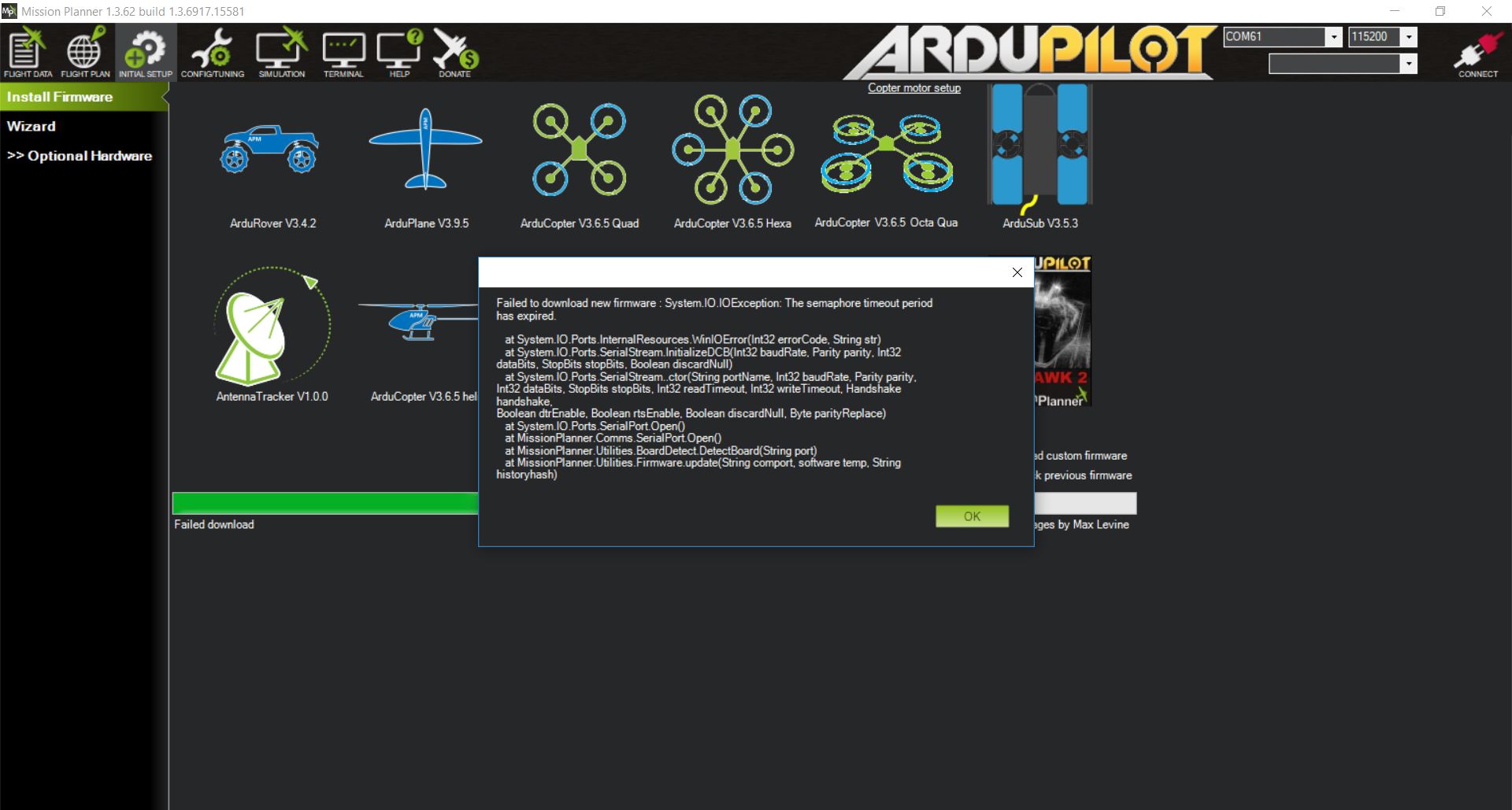
I’m guessing you have a driver/connectivity error, if missionplanner asks if it’s a linux board, probably something went wrong already.
Does windows (?) make a com port?
If it does, you can try uploading a “custom” firmware, downloaded from here: http://firmware.ardupilot.org/Copter/
Using custom firmware loading is working. Com port changed from 61 to 63 and able to connect to mission planner. Thanks
@Natapato I had a similiar issue with my Cube Purple in a standard carrier board. I was able to load the latest Rover beta, but it doesn’t auto connect when plugged into Mission Planner or QGC.
I can manually connect by selecting the serial port and clicking connect, but auto connect doesn’t seem to work. Any idea if it is hardware or firmware related?
I’m not sure why it doesn’t auto connect. Maybe just not fully support function for Cube purple.
I’m facing issues in the Battery monitor with Powerbrick mini and mini carrier board and unfortunately its the same in all three of them which I’hv got. The problem being the current shows negative and incorrect even after calibrating it. Any suggestions on how to correct it? @proficnc
negative? photo of your setup please?
how do we configure relay for camera trigger with the mini carrier board?
Exactly the same as with full…
1 Like