Hi all,
i had a crash with my octocopter using a pixhawk 2.1 cube. It happend 20 seconds after takeoff, motors stopped spinning and the copter crashed into the ground from about 2-3 meters.
It seems that the controller stopped working in mid air, the log file is also stopping before the copter is rotating on its roll axis towards ground. I had 2 powersupplies for the pixhawk attached, so i dont think it was a power issue (batteries were fully charged too).
Hi,
i cannot remember exactly, but i think the leds on the here-gps were blinking.
I had to disconnect the lipos very fast, because one of 4 batteries was damaged to much and i didnt want to risk a fire.
I have to say, that 20 minutes before this crash there was a short rain shower during flight and i had to land immediately.
I am now worrying that the i2c distribution board, which is mounted at the edge of my plattform (see photos attached), got hit by one drop of water, which could of course be the reason for fail of the fc?
Edit:
i just checked the logfiles from the secondary redundant pixhawk mounted on this copter, which should have overtaken control in such a case, but had not enough time before hitting the ground, caused by the low altitude i was flying at this moment. Its log is about 4 seconds longer than the log of the primary fc https://storage.robimo.at/owncloud/s/tHGd8acrf9RGX36
your log ends midair, no signs of anything strange prior to that.
Did you provide redundant power to the pixhawk from at least two sources ?
Most likely, it lost power midair.
It definitely looks like a power loss or brown out on the primary Pixhawk.
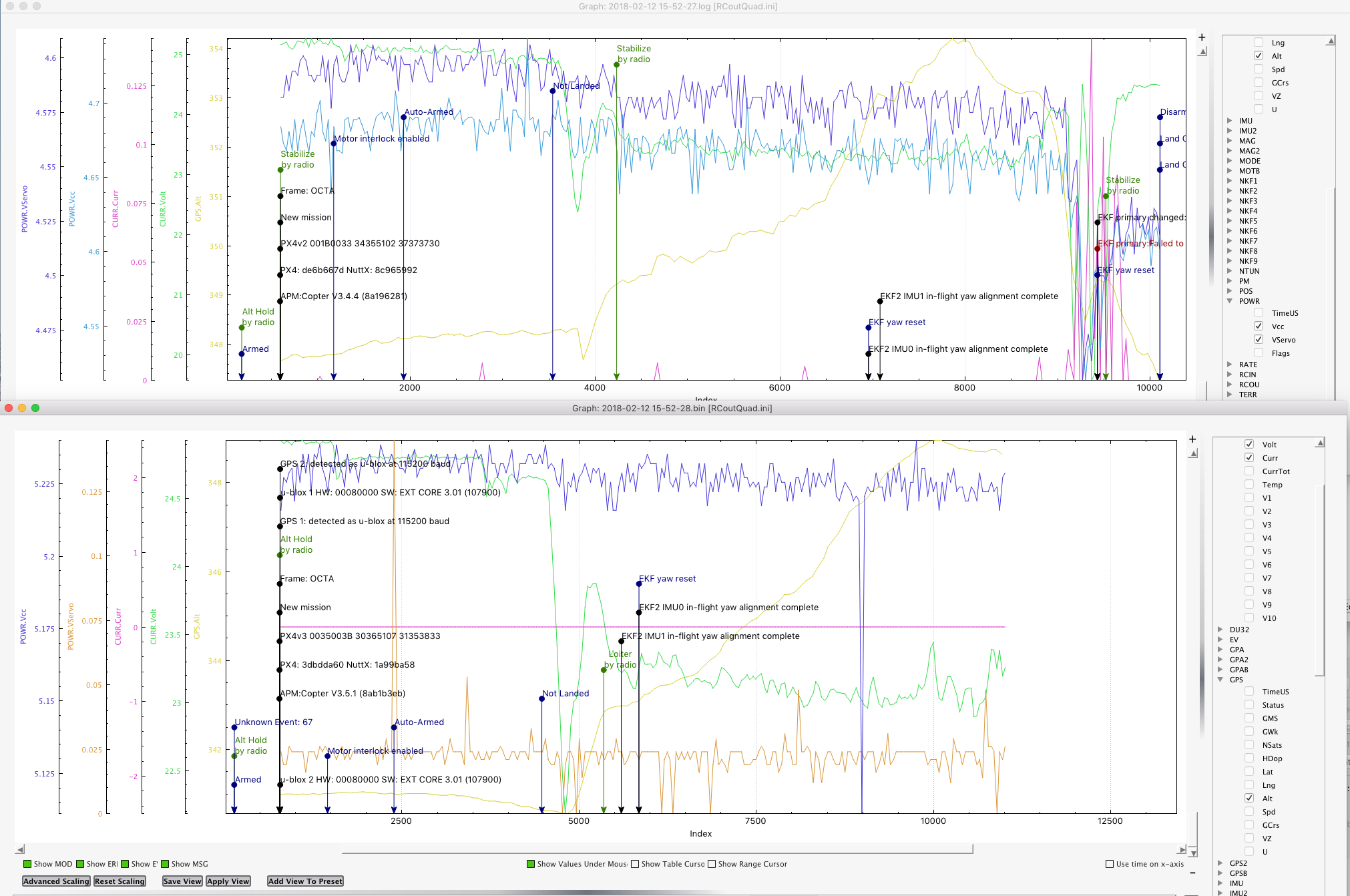
As @Andre-K pointed out the log stops in mid air.
The second one continues to the ground and shows some strange dips in voltage that might be consistent with a short or similar.
I noticed you do not have current calibrated on #2 or being used on #1
The thing that does stand out as strange is the sudden dip in the Vcc on #1 a while before failure.
Not a huge dip but it does stand out as indication something wasn’t right with power.
Hi and thank you very much for your hints.
I will double check all power wires and connectors for damage or unisolated parts and will report here if i can find anything.
Did you provide redundant power to the pixhawk from at least two sources ?
both power supplies have seperate wires which come up from the same powerdistribution board. The batteries are connected to the power distribution board via a 600A 45V Schottky diode, do be protected against short circuit in their cells. So there are not really two seperate sources.
But the #2 FC is also connected to the same distribution board and didnt fail.
To improve this i could attach the wires before the schotky diode on each input wire, so they are connected to seperated batteries and only share the ground?
I noticed you do not have current calibrated on #2 or being used on 1
Yes, the problem is, the entire setup can draw up to 400A, and i didnt find any current sensor that would be able to handle that