I’ve been working on VTOL a bicopter for several months (quadplane). It’s been going okay have managed VTOL takeoff and transition and landing (19 March 2023 - YouTube).

I have occasional issues with pitch stability in VTOL mode (seen on most flights). Currently I’m doing a rebuild as this eventaully ended with meeting a tree and serious damage to the airframe…so no plane to experiment with at the moment.
If anyone knows their stuff I’d appreciate some help on this…I’ve done my best to understand, but ultimately I’m using some guesswork. Currently I think the FF is probably way too low and possibly it’s a little nose heavy…
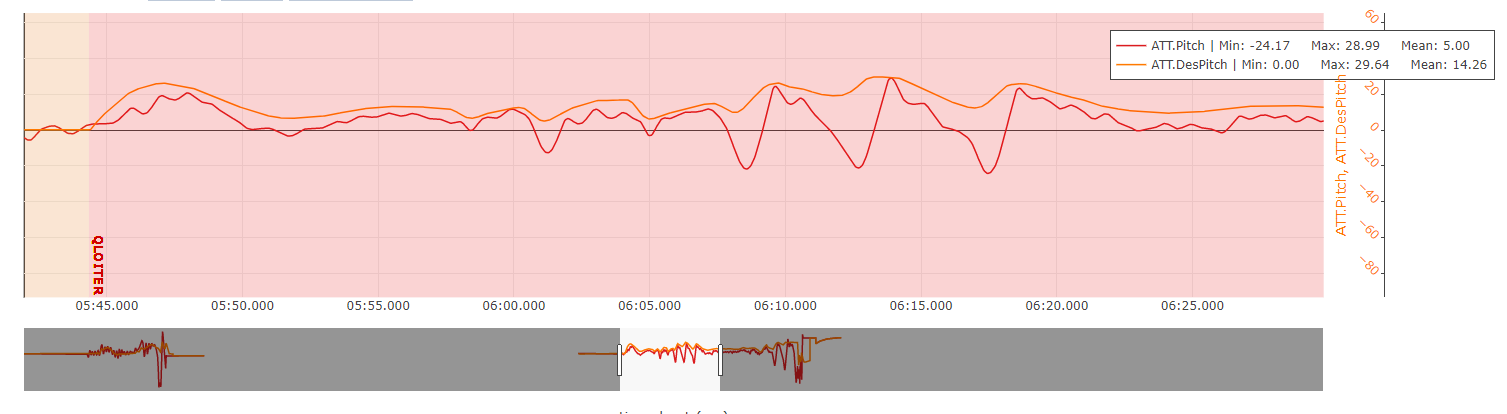
I’m thinking this is my manual PID-FF tuning being out as actual pitch isn’t tracking desired pitch well at all
Logfile from the last flight is here; TempShared - Google Drive
Logfile shows…VTOL mode, combinatin of QHover and QLoiter. . I was provding user input in hover mode, but mostly left it alone in Loiter (other than a quick test of the yaw control)…[I seem to have decent roll and yaw stabilty and control…although some slight oscialltion in yaw].The last few seconds of ‘flight’ involve a tree…so I’d ignore that bit! LOL.
Is anyone experiance enough to help on this? - my weeks/months of trial and error with guesswork just isn’t cutting it.