I’m really a newbye, I hope you can Help me.
I’ll try to make specific questions:
Question1: I started in loiter (supersimple mode) but i found that controlling the octocopter to the forward direction (pitch joystick forward) the copter goes backward.
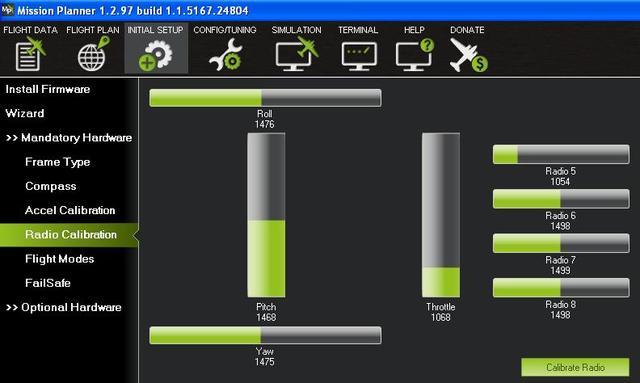
But on the mission planner, if i move the pitch forward, i see it going up in the radio control calibration page.
Question2: during the flight, there was some wind, not too much, and in loiter the copter compensates it.
I was flying at about 3 meters height (consider i don’t have the sonar).
It crashed apparently without reason. Here annexed you can find the log.
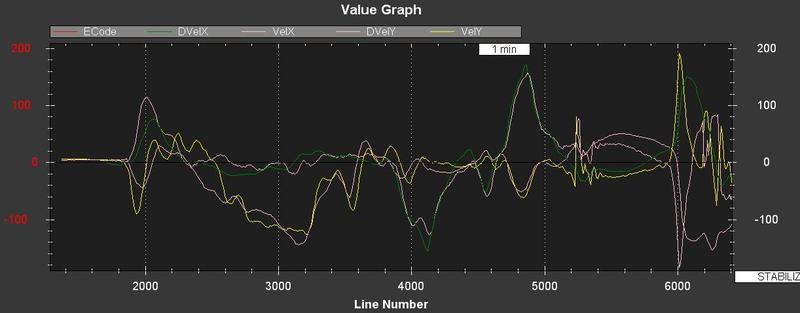
Question3: reading the manual page for the loiter ( copter.ardupilot.com/wiki/loiter-mode/ ) i’ve seen that in the NTUN messages, the VEL should follow the messages DVEL.
on the linked manual there is an image where this is clearly shown.
On my graph i see something different (consider first part of the recording where i was in loiter)
NOTE: can you see that in 2 points the signal on DVEL is the opposite of the signal on VEL…
feel free to give me some hint to understand the problems.
Also consider that i’m using a octo frame purchased by quadframe.com , a good gps ublox an external magnetometer, and a turnigy 9x radio control.
EDIT: i also have a video of the flight and re-watching it i remembered that the motors stopped to have power when the copter crashed. It happened more than one time (only once on the annexed log). I also break landing legs and some other parts… Help me to understand if i have some wrong settings, or inverted sensors like magnetometer…
You’re taking off for what appears to be a maiden with loiter and supersimple on. You need to be patient and methodical and get things working in stabilize first.
Untuned rate PIDs - you need to get the copter tuned before you start moving on to loiter and things like that.
COMPASS_ORIENT 4 - YAW_180, is this a 3dr GPS+MAG? If so, there are two choices: your GPS antenna is pointing at the ground or your COMPASS_ORIENT is set wrong.
I can’t tell if your sticks are reversed because you have supersimple on
So, copter crashed (inverted?) and the motors powered off? Or a motor stopped and the copter crashed?
We do detect inverted crashes and disarm the motors.
Loiter flyaways are caused by either vibration or compass problems. Vibration screws up the accelerometers, causing us to measure accelerations that aren’t there, causing our inertial navigation to diverge. Compass problems cause our accelerometer measurements to be applied to the wrong axes.
It looks like you may well have both. I would get the copter performing reliably in alt_hold mode first (depends only on vibration, not on compass), then move on to loiter. You should be able to fly the copter around in alt_hold without it climbing away or descending too much (though you will see some descent because of air pressure when you’re moving fast)
You’re taking off for what appears to be a maiden with loiter and supersimple on. You need to be patient and methodical and get things working in stabilize first.
[/quote]
ok, i’ll follow all required steps.
ok, this is still not clear to me, i don’t know what PID’s are, anyway i will follow your next hint.
[quote=“jschall”]
COMPASS_ORIENT 4 - YAW_180, is this a 3dr GPS+MAG? If so, there are two choices: your GPS antenna is pointing at the ground or your COMPASS_ORIENT is set wrong.
I can’t tell if your sticks are reversed because you have supersimple on
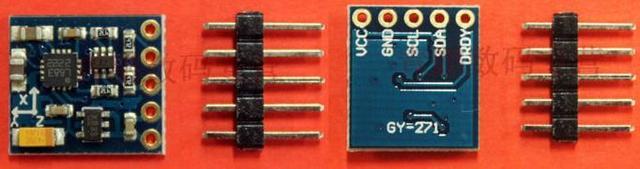
Then i purchased the magnetometer GY-271 HMC5883L (again from china)
this one: http://detail.tmall.com/item.htm?id=25687720601
here some pictures:
i had some trouble to place the magnetometer, and now, sincerely, i’m not sure that it’s in the correct position, but it seems to me that the heading is reported in the correct way.
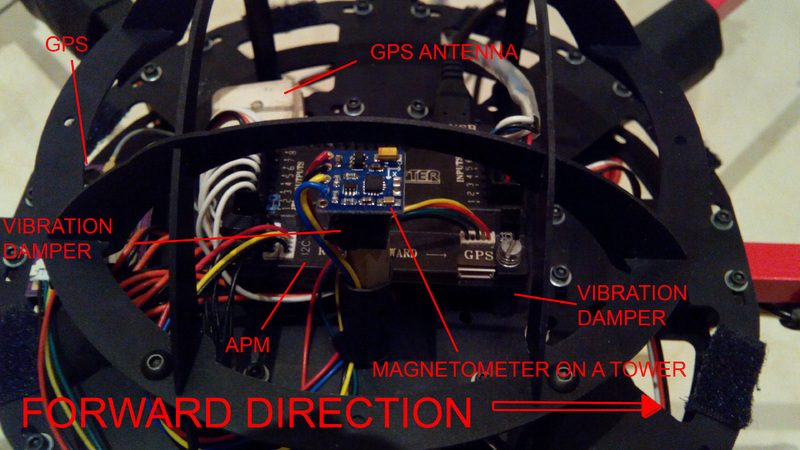
This is a picture that shows the position of the APM, and the magnetometer:
On the picture you can see that the magnetometer Y axis points to the forward direction, the X axis points to the right direction. about the Z axis i’m not able to understand if it’s pointing up or down.
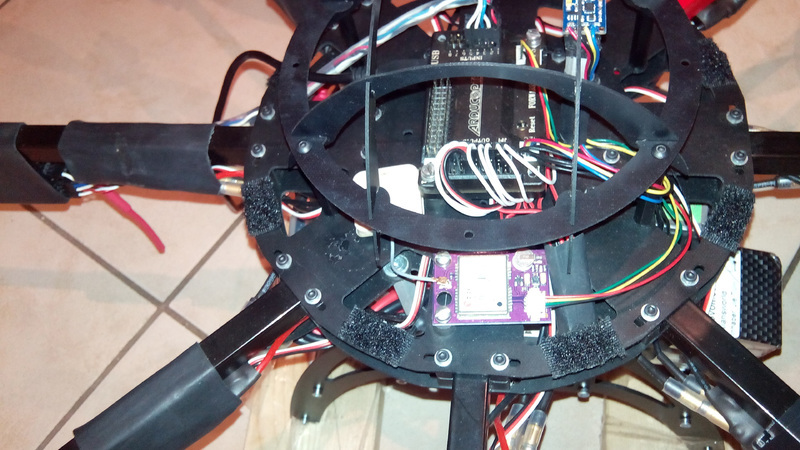
This is another picture from different point of view, just if something it’s not clear on the first image:
[quote=“jschall”]
So, copter crashed (inverted?) and the motors powered off? Or a motor stopped and the copter crashed?
We do detect inverted crashes and disarm the motors.[/quote]
some motors stopped to run and then the copter crashed.
if for “inverted” you mean that the bottom of the copter becomes the top of the copter,
i can tell you that the copter never inverted.
[quote=“jschall”]Loiter flyaways are caused by either vibration or compass problems. Vibration screws up the accelerometers, causing us to measure accelerations that aren’t there, causing our inertial navigation to diverge. Compass problems cause our accelerometer measurements to be applied to the wrong axes.
[/quote]
yes but you have my log. Could we check the log to understand if the vibration are too much high?
[quote=“jschall”]
It looks like you may well have both. I would get the copter performing reliably in alt_hold mode first (depends only on vibration, not on compass), then move on to loiter. You should be able to fly the copter around in alt_hold without it climbing away or descending too much (though you will see some descent because of air pressure when you’re moving fast)[/quote]
Ok but there was some wind and in halt hold mode it was flying away. When i switched to loiter it stopped on that point, and i could move it slowly close to me.
Moreover to drive it with inverted pitch is hard.
Why you say that you are not able to tell me if i have inverted pitch?
the loiter supersimple mode uses the arm gps position in order to understand which is the launch position.
So i placed the head of the copter to the EST, then i armed it, then i activated the throttle, then i activated the pitch to the forward direction, and he went to WEST.
Note: connecting the copter to the mission planner, when i activate the pitch FORWARD on the radio, i see the pitch indicator on the mission planner increasing its value.
YAW_180 can’t be right if your compass X axis is pointing left, and your compass Y axis is pointing forward. In ArduCopter’s coordinate system, X is forward, Y is right, Z is down. I’ll get back to you with how to figure this out properly. I’m pretty shocked that it loitered at all.
[quote=“Gaucho”]some motors stopped to run and then the copter crashed.
if for “inverted” you mean that the bottom of the copter becomes the top of the copter,
i can tell you that the copter never inverted.[/quote]
Ok, that could be:
Hardware failure (ESC signal wires, ESC power wires, ESC, ESC sync issue, motor power wires, motor, prop adapter)
ESC calibration or THR_MIN problem (ESCs not calibrated, THR_MIN too low)
You can put the copter in ESC calibration mode by putting the throttle stick to maximum, plugging in for a few seconds, unplugging, and plugging in again. The ESCs will start beeping. Drop the stick to minimum and they will beep again. You want THR_MIN to be high enough that they spin somewhat aggressively… a solid 60 PWM or so above where they start spinning at all.
They look fairly high, but the magnitude of the noise doesn’t tell me anything about whether it could be aliasing.
[quote]Ok but there was some wind and in halt hold mode it was flying away. When i switched to loiter it stopped on that point, and i could move it slowly close to me.
Moreover to drive it with inverted pitch is hard.
Why you say that you are not able to tell me if i have inverted pitch?[/quote]
Is your pitch inverted in alt hold? If you were flying supersimple the whole time we can’t tell if it was a problem with supersimple or a problem with your radio.
Pointing the copter NORTH will result in: positive X, zero Y.
Pointing the copter WEST will result in: positive Y, zero X.
Now here’s the tricky part:
When the compass is flat on a (non-magnetic) table, the Z axis will not usually be zero. This is due to the inclination of the magnetic field. It may well read a much larger value than the other axes due to the magnetic field being more vertical than horizontal (my inclination is 60 degrees). In general, this should mean that north of the equator, you get a positive value flat on a table, and south of the equator, you get a negative value. If you want to be absolutely sure, I recommend that you do this:
Point the copter NORTH so the the Y magnetometer is roughly ZERO.
Tilt the copter UP 90 degrees so that FORWARD is UP - the BOTTOM of the copter will be pointing north.
[quote=“jschall”][quote=“Gaucho”]when the copter is pointed to north, mz is 270. when the bottom of the copter is pointing to the north, mz is about 180 (±10).
x and y are correct…
Is it ok?[/quote]
Yep. Your orientation is correct.[/quote]
Yes but you said that “YAW_180 can’t be right if your compass X axis is pointing left, and your compass Y axis is pointing forward.”
how is possible that i’m reading x and y correctly ?
when mz should give zero value? in which position?
[quote=“Gaucho”]Yes but you said that “YAW_180 can’t be right if your compass X axis is pointing left, and your compass Y axis is pointing forward.”
how is possible that i’m reading x and y correctly ?
when mz should give zero value? in which position?[/quote]
I’m guessing the compass is labeled incorrectly. Z will be zero if you align it perpendicular to the magnetic field, which means you’d need to have the copter on its side and point it north.
Hi Jschall, i ordered a new frame (hexa with foldable arms this time) and in the meantime i repaired the OCTO frame. i repositioned the magnetometer starting from a situation with ROTATION_NONE.
I rotated the magnetometer on all the axis, finding that the only solution is to place the pcb with the components on the top side(up), and the south is indicated by the y and x is looking to the west.
Then i calibrated and i obtain more or less the same previously situation.
This is coherent with the previous magnetometer setup, then, there is no problem in the magnetometer.
THR_MIN now is 130. Do i need to manually setup it or the ESC calibration sets it?
You also wrote the possible problems:
i checked the compass orientation, it’s ok
i added vibration dampeners under the Ardupilot. I also added dampeners on the gps antenna cause it was previously direclty pasted on the frame, even if i think that the antenna is passive and not affected by vibrations.
I did the ESC calibration, i suppose that now this point is ok.
propellers was well tighted, no problem in the propellers. Motors seems ok, they all spin… ESCs are new, I can’t see a problem… Wires are well connected, i personally crimped and soldered them.
I’m thinking about a possible fact:
-the power distribution board (i soldered the battery monitor module on my custom 8 way power distribution board) or the ESC could have heating problems and in that situation may occour a power loss…
Before to let it fly again, i want to solve the inverted pitch problem. To make it easy and clear, i created a dedicated thread, just for the inverted pitch problem, then i’ll be back here to solve the crash problem. Can you help me? This is the thread for the inverted pitch: viewtopic.php?f=25&t=6969&p=14138#p14138
Maybe the problem was the fact that i didn’t performed the ESC calibration.
After inverting the pitch (i mounted it in the opposite way) and calibrating the esc, and increasing the dumpening under the APM, today i retried to fly.
flight mode was normal, no simple, no supersimple.
the apm follow the commands.
i tried in stabilize, but my friend was holding the legs…i had fear… then, since it seemed to fly stable (apart the wind problem), i erased all the logs.
I made 4 flights and i saved them to log (you can find them annexed to this post).
It recorded only 2 files, even if i waited for the disarm between one flight and the next. I don’t know why it saved only 2 files. could you explain why?