I faced it on the real vehicle with Plane-4.4.0-beta3 firmware and also in SITL with Realflight on Plane-4.4.0-beta5, where it reproduces constantly. These versions of firmware have one commit on top of the original betas, which adds a method to Lua’s bindings.desc, but this looks unlikely to be the cause of the issue.
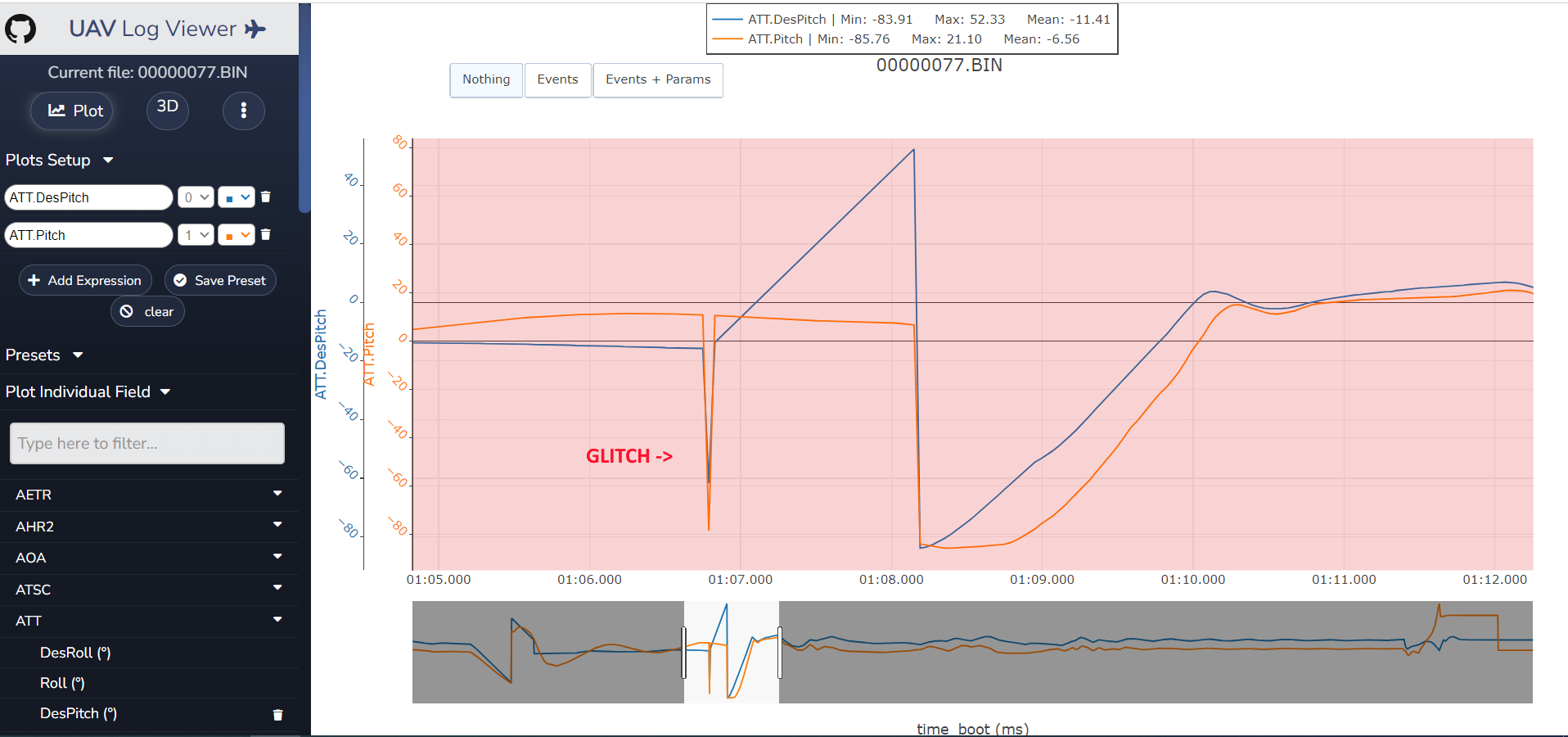
Pitch is measured as 0 deg when the nose is horizontal in FW mode and 0 deg when the nose is pointing up in VTOL mode. It seems that the two are mixed during a mode transition, and that no discontinuous attitude change is actually occurring.
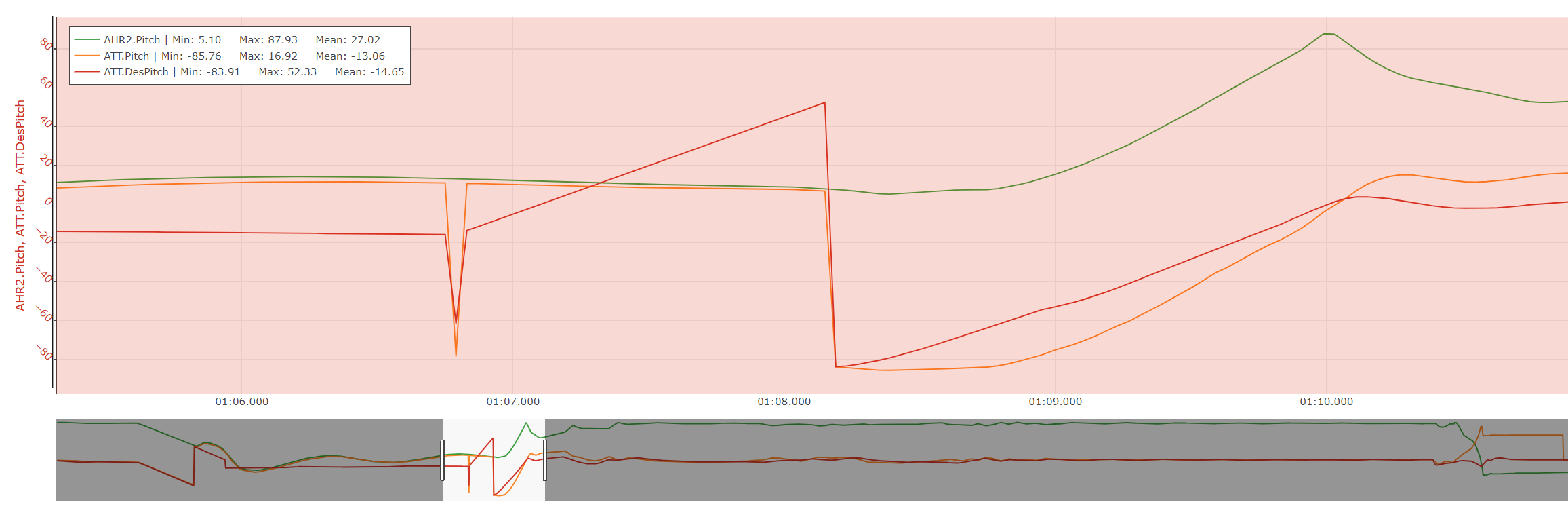
AHRS.pitch consistently shows a measurement of 0 deg when the aircraft is horizontal, indicating that there is no problem with the flight itself.
It is just a logging race condition, it logs the copter view attitude view momentarily then goes back to plane. This is is because the mode change happens instantly when you hit the switch but the transition is only started when the main loop gets to doing the quad plane update.