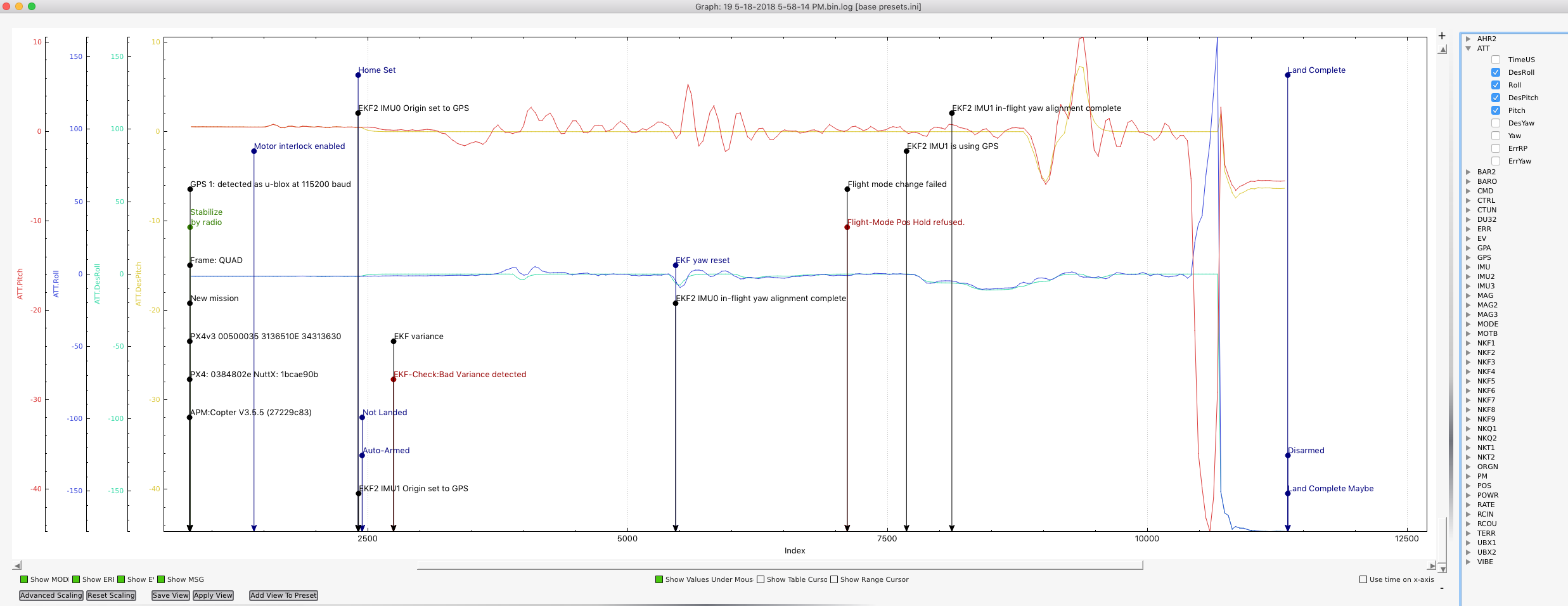
Any idea why my quad would flip the pitch axis controls in poshold mode? Some funny things happened on this flight as you can see in the log. Any help is appreciated!19 5-18-2018 5-58-14 PM.bin.log (910.5 KB)
There are probably a few contributors to the problem.
Have you done an Autotune?
Your aggressiveness is set to 0.1 which I think is too high.
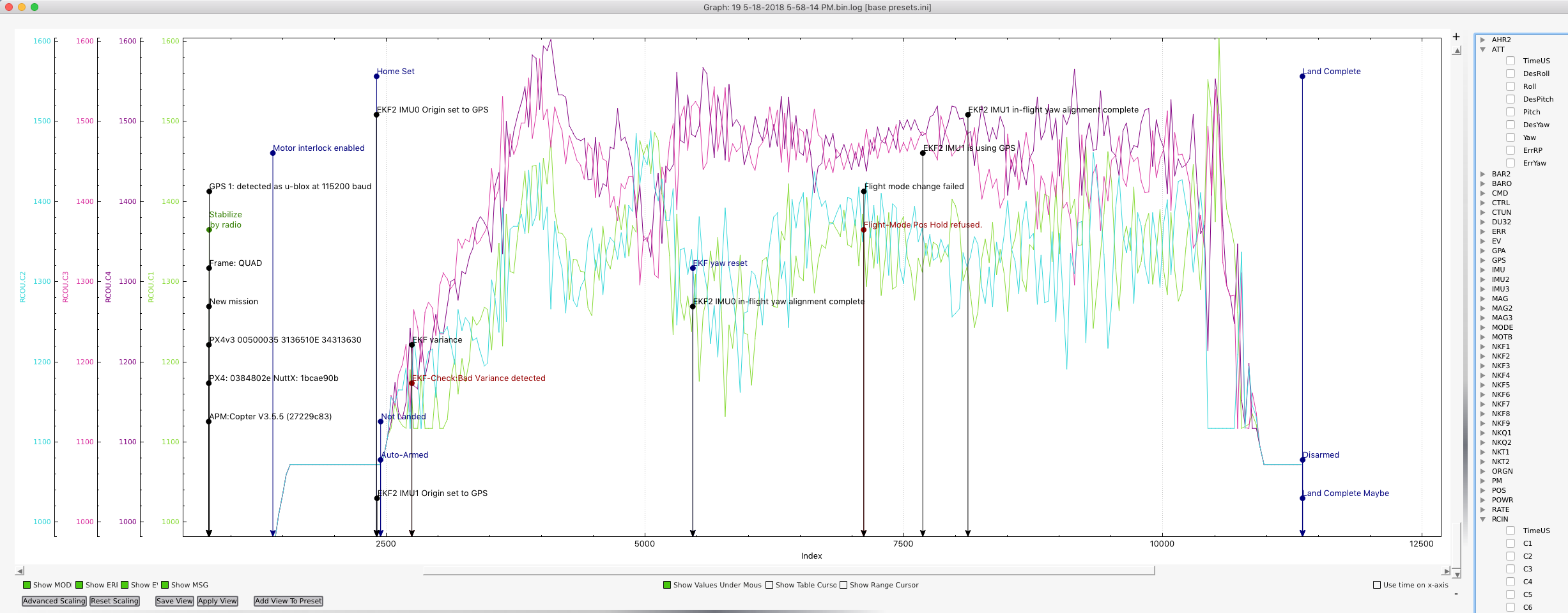
Your copter has plenty of power, hovering at around 1400, and is unstable, especially in pitch.
The RCout shows motors 3 and 4 working harder than 1 and 2.
Are your motors level.
Somethings not right if the CW motors are working harder than the CCW motors.
Your vibrations are borderline.
Could do with some improvement.
First step would be to balance the copter, this includes your thrust lines.
Next, autotune with a reduced aggressiveness. Start with the minimum and work up from their.
You were not in position hold as the flight mode change was refused. A 3D fix does not mean the EKF will accept the guided mode. You need to switch to that mode on the ground before arming to check that the EKF is happy with the GPS lock.
You also had a bad variance detected, probably as you are trying to use the 3 compasses.
For a start just choose the external and turn the others off. You can always turn them on later when you have the tune sorted.