This is a decacopter with ch1 and ch2 farthest front and ch9 and ch10 farthest back. The ATT.desroll and ATT.roll are quite constant(level in roll during this whole situation). This has happened multiple times now. and once it was able to recover.
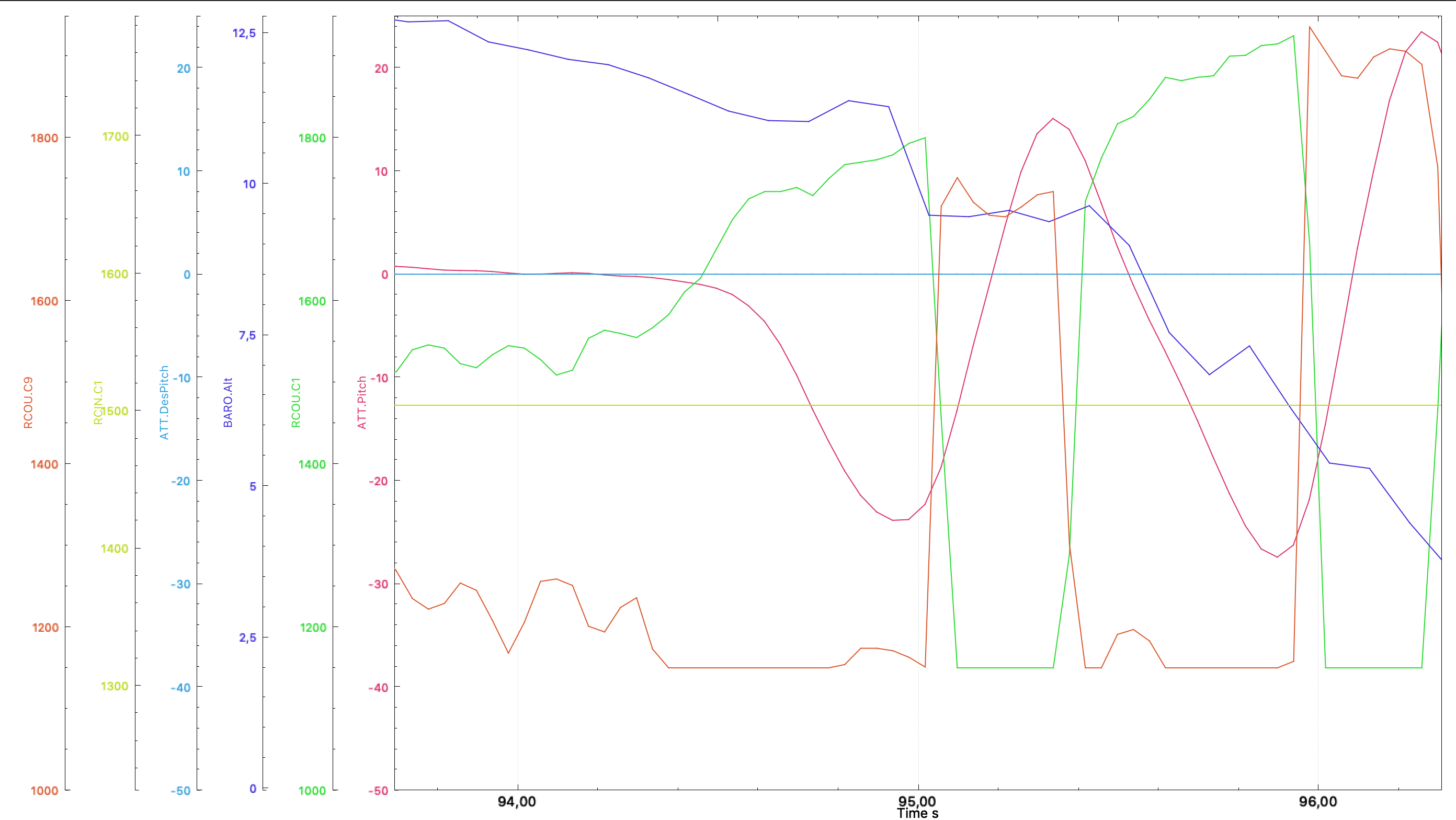
Here it can be seen that the rc inputs were stationary but ATT.Pitch diverges from ATT.DesPitch quite spontaniously.
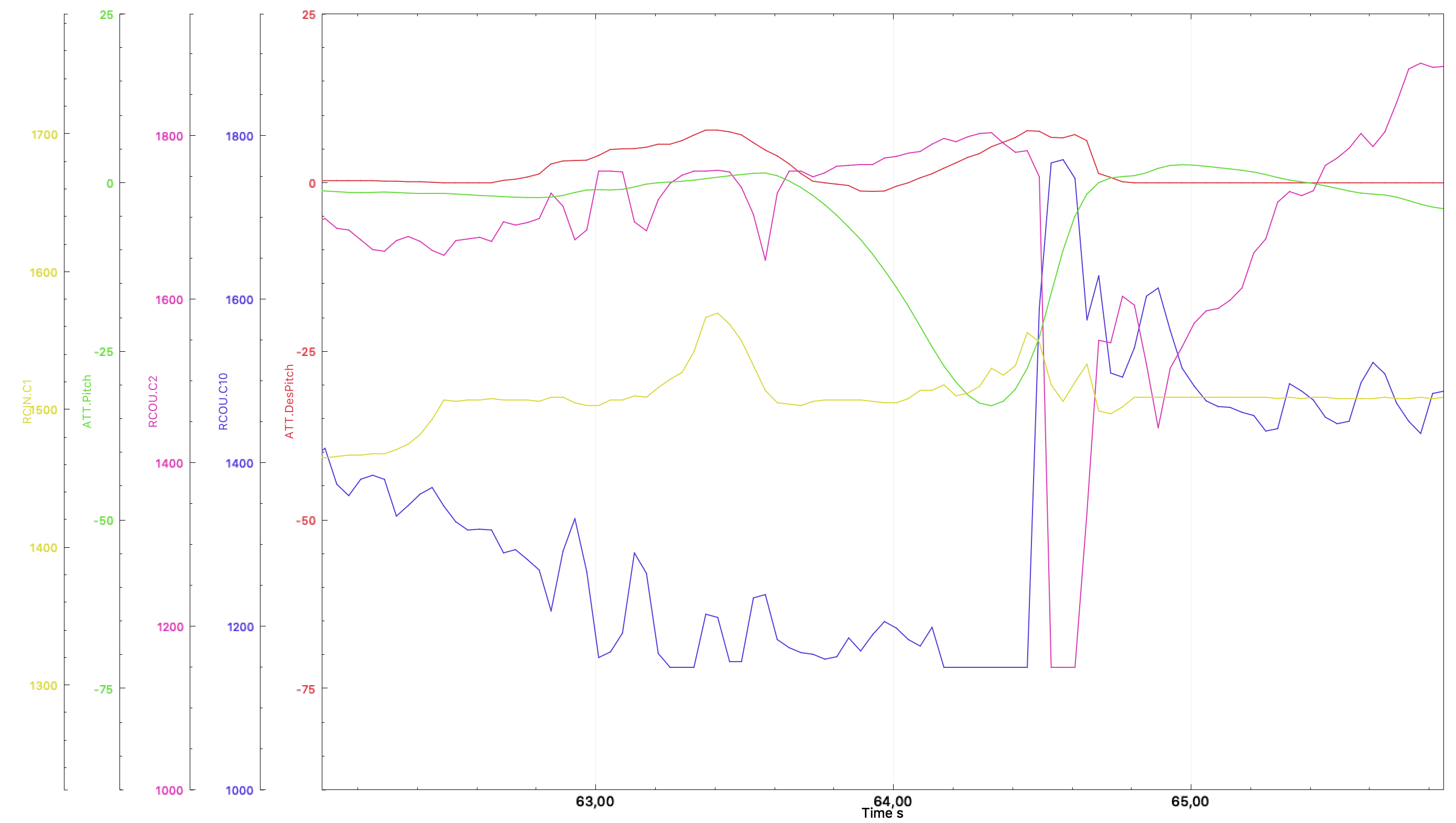
Here the rc inputs are not quite as stationary and ATT.Pitch diverges from ATT.DesPitch, but the aircraft manages to recover.
I know the aircraft is a bit front heavy, but still, this behaviour is really strange to me.
Any ideas what might cause this behaviour?