Hi all,
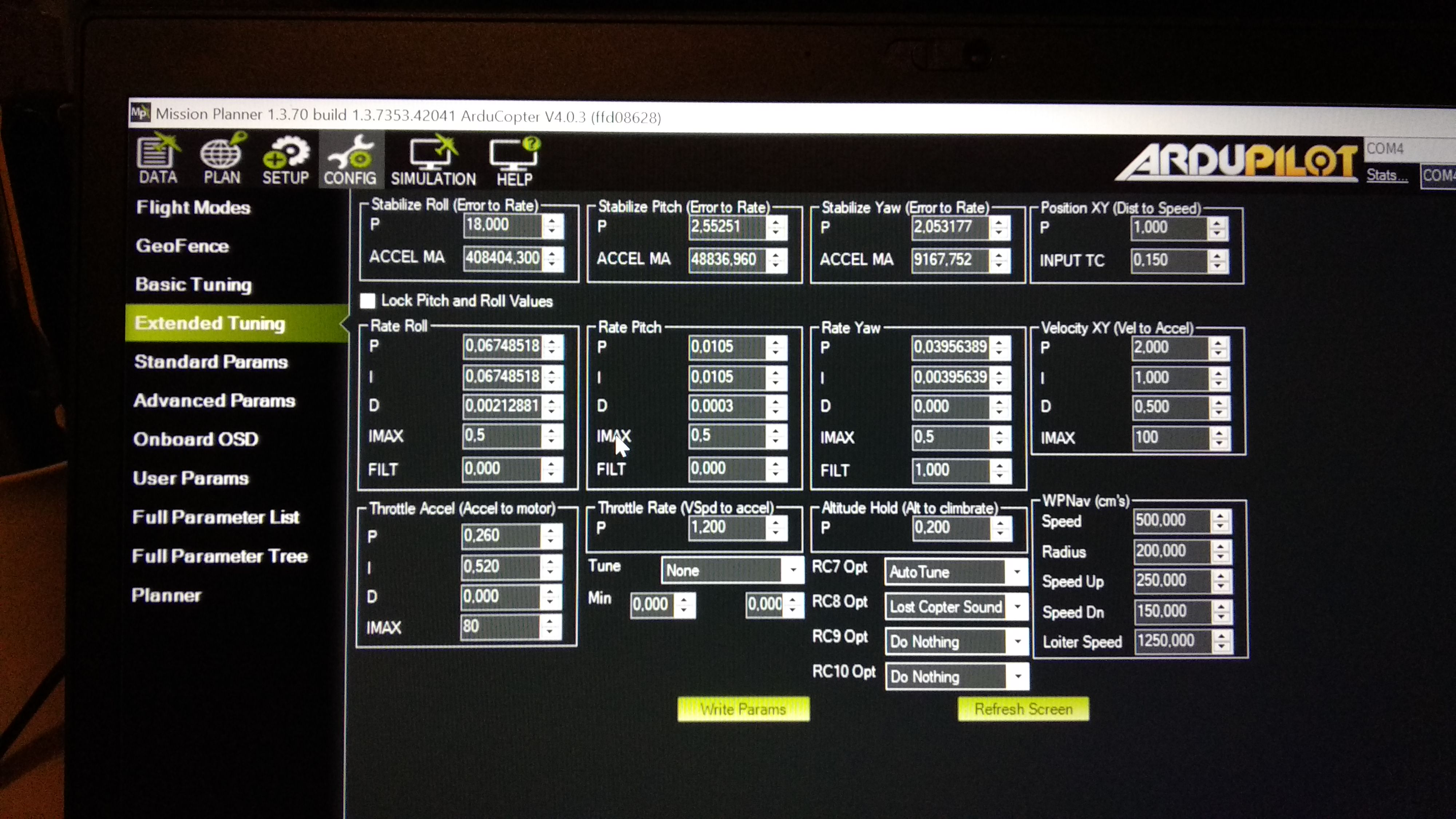
after a first attempt at autotune only the roll axis went well, I tried in one pitch and roll flight session. after 10 minutes of flight, the autotune procedure ended with these values. On the next flight with the new PIDs the quadcopter did not even take off.
how could this have happened?
Thanks
Arducopter 4.0.3 3" quad