I am running a Navio2 autopilot on a boogie board with Blue Robotics Ping Sonar for bathymetric surveys. I am using QGC and trying to configure the sonar, which is plugged into the ADC port of the Navio2. I was wondering if anyone knew the address of that port, I’ve tried googling and searching around the forums for help but haven’t found an actual solution yet.
What ArduRover firmware do you have installed? The Ping Sonar driver is only available starting at ArduRover 4.0.0. In QGC, go to vehicle setup>Summary>Frame>Firmware Version.
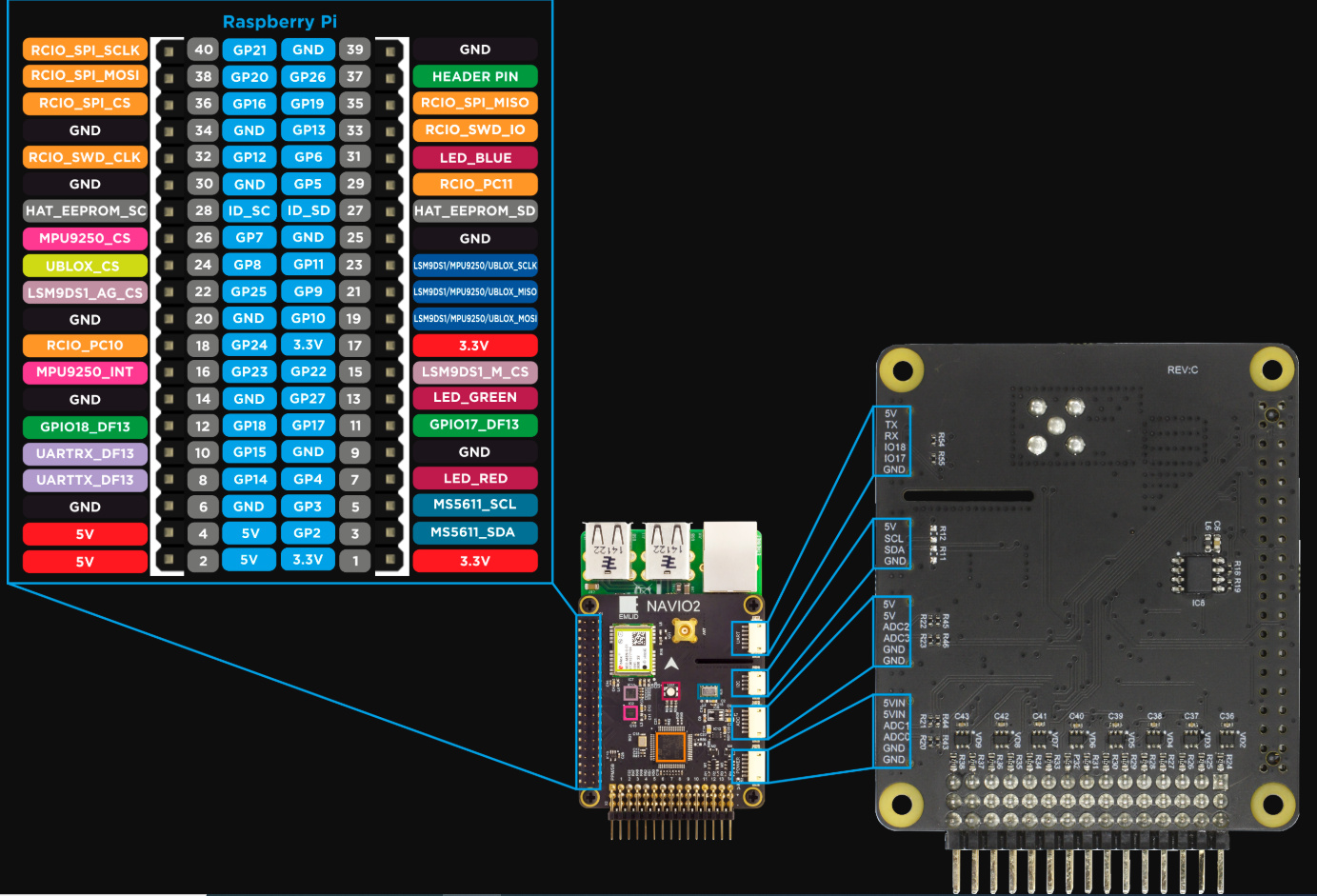
The Ping needs to be wired to a UART/Serial port (not ADC). Rx-Tx/Rx-Rx/Gnd-Gnd/5V. The Navio2 does not have as many UARTs as most flight controllers so you might need to remap pins on the servo rail or use a USB-Serial port adapter on the RPI.
Thanks KG, this fixed the issue. I am running ArduRover 4.0.0 and have my telemetry radio plugged into the USB ports on the RPi. Sonar is plugged into UART and reading accurately.