I have set this parameter for TX with sprung throttle (Siyi MK32), I have test it in altitude control modes but when the stick is centered by the spring >> accelerates by 50%
Any suggestions?
An expert suggests setting it to 7. Mine is Skydroid T10.
Hi @Aticof,
If you have an onboard log (aka .bin log) then we can probably diagnose this better.
This sounds like this other report and the solution was:
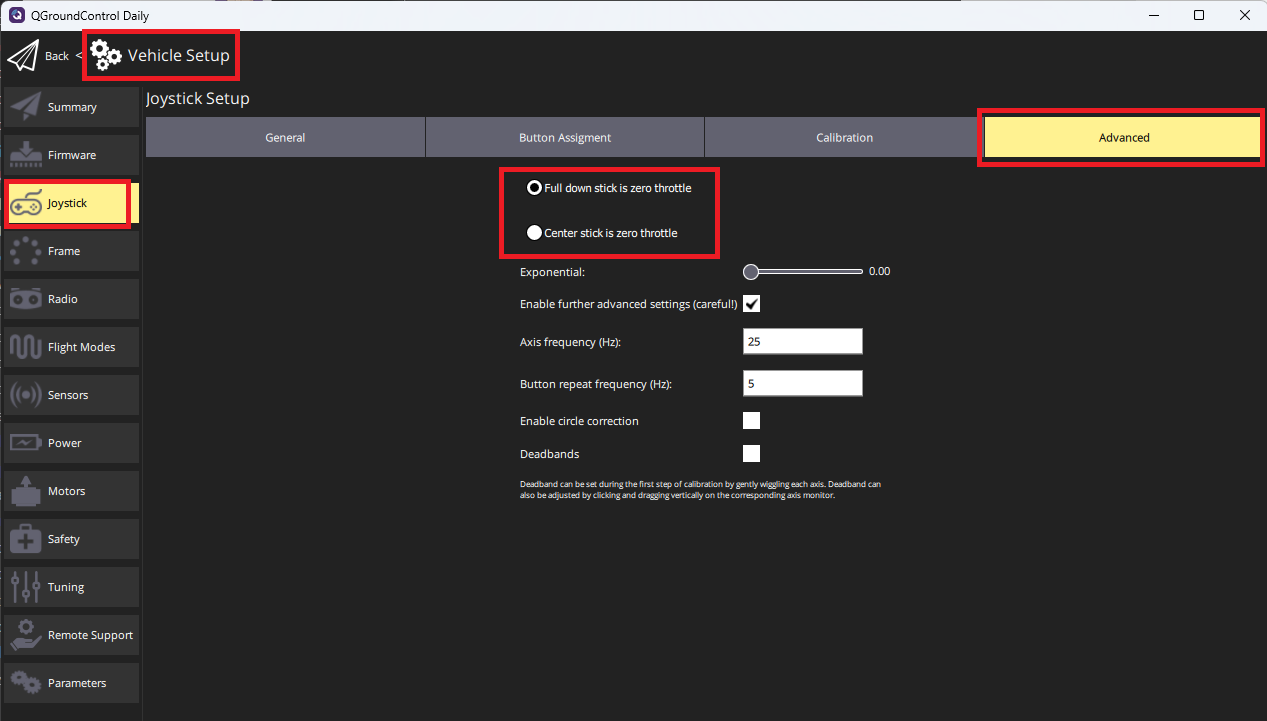
- Ensure that in QGC the “Full down stick is zero throttle” option was selected
- Ensure that RC3_TRIM = 1500
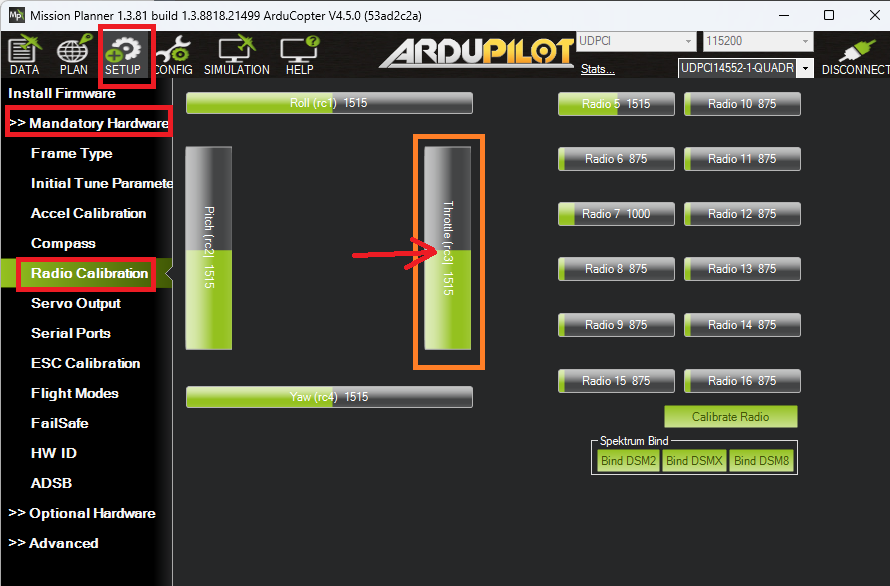
We recommended that the user check the throttle bar appeared in the middle using Mission Planner’s “Radio Calibration” screen.
BTW, the issue did not have anything to do with the PILOT_THR_BHV function and setting PILOT_THR_BHV = 7 should not make any difference. “7” is 1+2+4 and “2” and “4” are unrelated to the issue that Atico brings up.
- 1:Feedback from mid stick
- 2:High throttle cancels landing
- 4:Disarm on land detection
Hi @rmackay9 , thank you very much for the quick answer.
Attached a .bin file.
QGC does not recognize my Siyi MK32 transmitter as Joystick and I cannot change that configuration to.“Center stick is zero throttle”
2024-04-30 14-25-14.bin (880 KB)
Hi @Aticof,
It looks like the vehicle is being flown in Stabilize mode. As mentioned in the “overview” section of the page, in stabilize mode the pilot must constantly adjust the throttle to keep the vehicle’s altitude stable.
Perhaps AltHold or Loiter mode is what you’re looking for?
I had same problem in Althold with TX-12 on FPV. Sometimes it fly ok, but suddenly won’t descent.
After “Throttle behavor” set 2 all ok.
1 Like
Sorry, I forgot to change the flight mode to AltHold. I have followed the steps proposed by Bobzwik to obtain the log.
2024-05-01 13-05-04.bin (842.9 KB)
The response to your throttle inputs looks good. Your throttle stick does output 1100 at the lowest and the drone “doesn’t” try climbing when you center your throttle stick (DVD = 0). And then your desired velocity increases (negative on the graph) when you throttle up, and decreases (positive on the graph) when you throttle down. So your issue doesn’t seem to be “Full down stick is zero throttle" in QCG.

I say that your drone “doesn’t” try climbing, because your altitude estimate drifts a bit before you lift your drone, and also when you lay it down. Roughly 25 cm in 10 seconds. Your GPS altitude readings travel by 20 m in 20 seconds, while reporting an accuracy of 2 m and a very noisy vertical velocity. That’s quite an issue. The EKF is probably having a rough time estimating altitude.
but when the stick is centered by the spring >> accelerates by 50%
What do you mean by accelerates by 50%? what is 50%? Could it be that your state estimation is bad, Ardupilot thinks it is descending, so it compensates by ascending?
In this log, your barometer altitude seems a lot more precise than your GPS altitude. Have you tried flying in AltHold without GPS? But I know it’s possible that your barometer might also be affected in flight (compared to the log you shared which is just handheld movement).
Thanks for the log analysis.This test is without GPS Fix and without props, I think this is the reason for a bad GPS altitude.
“The stick is centered by the spring; accelerates by 50%” >> it is just an appreciation of the motors sound, then I may be wrong.>>My fear is that after arming and with sprung stick centered, the drone will take off.
I will do a real test with props and GPS fix to verify if the throttle inputs looks good.
Both your GPS have a status of 3 in the log, signifying GPS_FIX is ok.
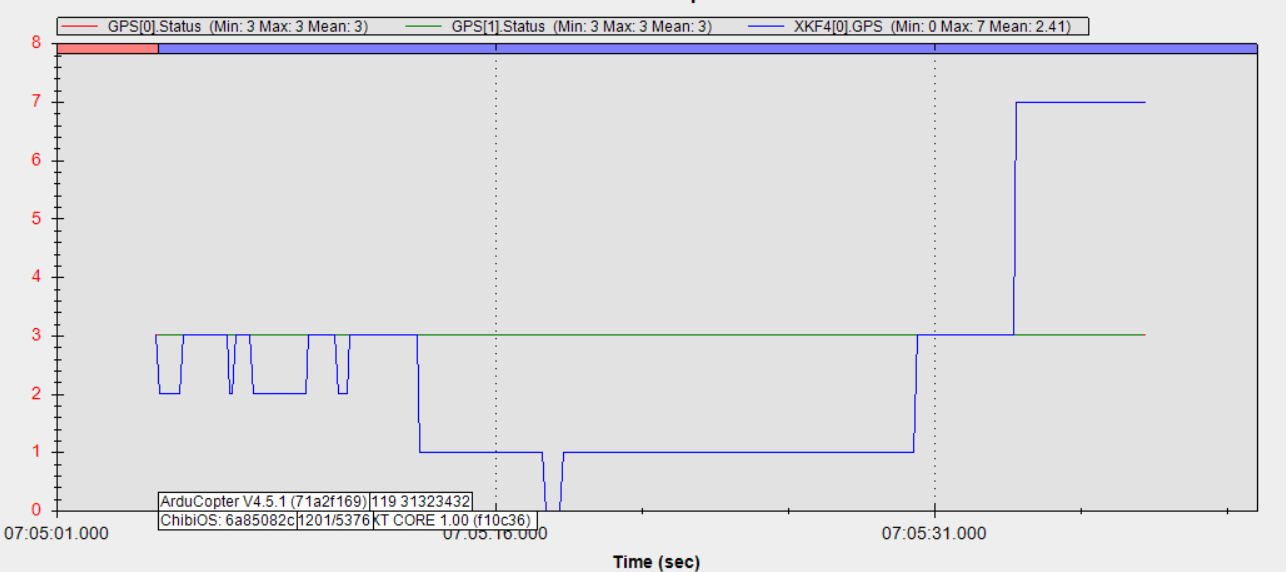
The EFK GPS filter status (XKF4.GPS) changes between 2 and 3 at the start, then goes to 1. According to the code, 2 means bad horizontal accuracy, 3 means bad horizontal accuracy and bad speed accuracy, and 1 means bad speed accuracy. No mention of bad vertical accuracy. At the very end it goes up to 7, which is bad speed, bad horizontal and bad vertical accuracy.
I’m not the best at diagnosing EKF issues. @rmackay9 what’s your opinion on this?
If you want, tie your drone down to the ground and place some foam/mattress/cushions underneath. The rope will stop it from flying away and you can engage your emergency switch and the drone will fall in the cushions.
I use two GPS F9P for “GPS for yaw” and this requires RTK Fix, maybe not RTK fix will avoid those errors?
Something is either interfering with your GPS, or you are flying in a GPS poor environment (indoors, under trees or structures), or your GPS is not properly configured, or you’re using an improper GPS antenna with your F9P.
All my F9P modules easily reach over 20 satellites, HDOP under 0.6 and VDOP under 1, but yours only reaches 9 satellites with an HDOP of 1.3 and a VDOP of 1.9. In my experience, that’s not really normal for an F9P. It seems that the log starts after 1.5 minutes of being powered on. If it was a cold start (drone was not powered outdoors for the 2-3 hours before the log was taken), that might be the reason the GPS quality is bad. But still, I would expect it to be better than that after 2 minutes of being powered on.
EDIT: For reference, I reach 10 satellites in 30 seconds and 20 satellites in 3 minutes. I’m looking at one of my old logs, so I’m unsure if that’s a hot or cold start. But I suggest having the drone powered on at least 5 minutes before investigating GPS accuracy issues.
Yes, it is a GPS poor environment (indoor).
I will do one outdoor real test.
1 Like
Your 2024-04-30 14-25-14.bin (880 KB) and 05-01 drone are different totally.
It is like a 9" to 22" propeller octocopter drone.
Have you done properly for this?
If you have done a Motor test with MP, MOT_SPIN_ARM,0, cannot be zero.
EK3_SRC1_YAW,2, may want to keep it to the compass (default) first.

You are right, between one log and the next, I changed the setup for 22" props.
I have been trying to diagnose an issue with the MK32 and QGC and wanted to verify if you are having the same problem. If QGC is not connected on the MK32, my throttle, yaw, pitch and roll from the 2 joysticks on the MK32 work fine. As soon as I connect QGC, there is no PWM output from those 4 channels. All the other channels work fine but those are dead.
The virtual joystick on the MK32 touch screen works fine and generates servo output as expected but, it is not something I would ever use in real life!
Hello @rge99 , I have installed Mission Planner and I dont have the problem that you mentioned but I seem to remember that with QGC the 4 channels worked correctly. Now I am out of my city but I will certify it to you next week.
Check Datalink, I use these parameters to connect to MP & QGC:
Connection > USB COM (not UDP)
Flight Controller > CUSTOM
Baud rate > 115200
Thanks - Mission Planner works fine. The problem is with the Siyi MK32 and QGC. When QGC connects, the 4 channels stop working even though, the virtual stick on the screen continues to work. Waiting for Siyi Support to get back to me