I have tx with sprung centered throttle control.
When I arm the model with throttle stick pull down and right rudder (armed), then I slowly release the stick about 5 to 10% but model reaches immediately throttle level to MOT_THST_HOVER.
Then what is mean center stick of throttle level(Min 1100, Mid 1500 Max 1900).
I want to do takeoff from the ground even from stabilize with 50 percentage throttle. If I set PILOT_THR_BEHAVIOUR enable what it will do?.
MOT_THST_HOVER is the max channel 3 percentage in percentage?
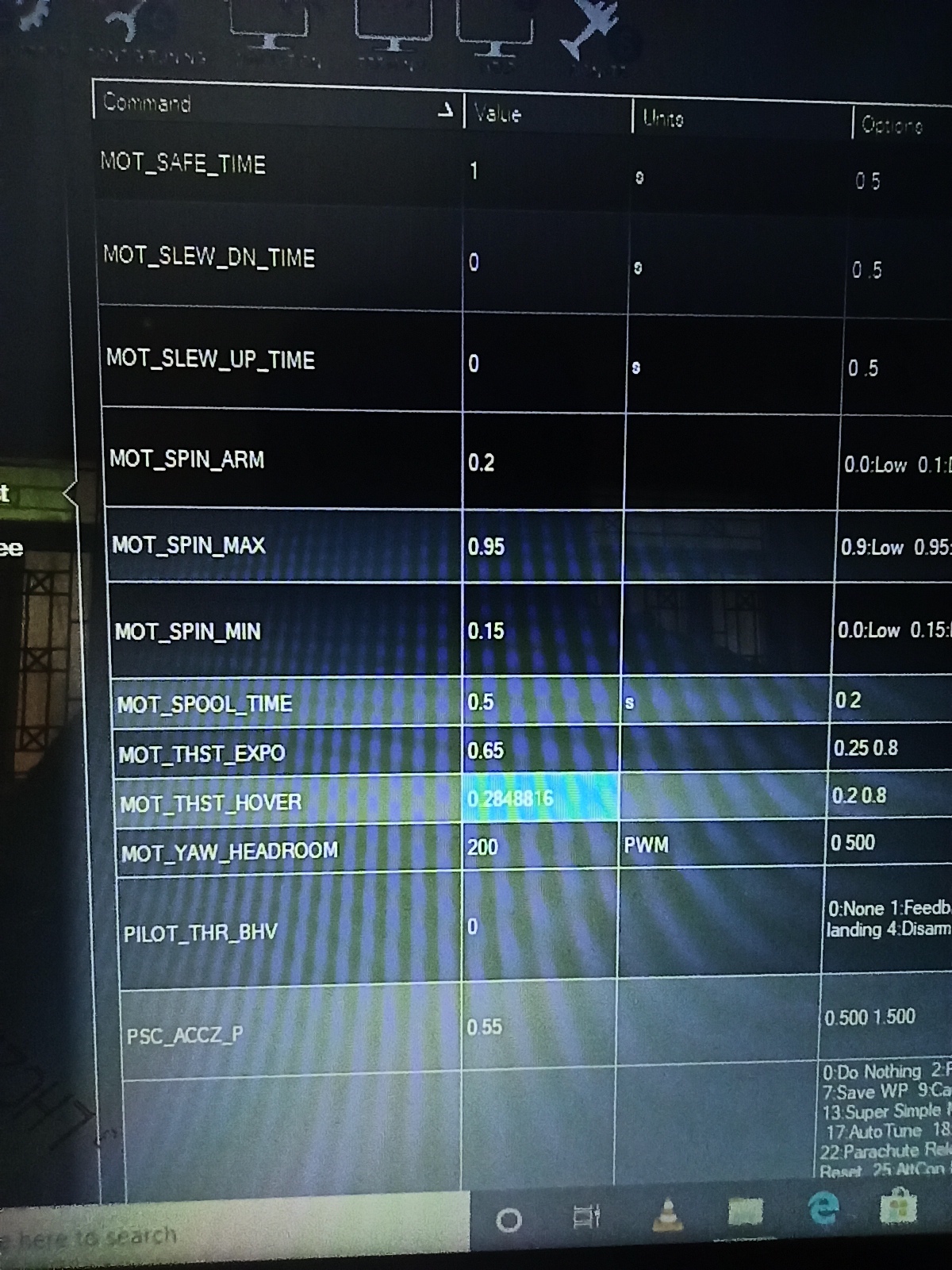
If you have a center sprung throttle stick, you want PILOT_THR_BHV set for a value of 7. Also set MOT_HOVER_LEARN to a value of 2, for learn and save. Your hover throttle will be set automatically while hovering.
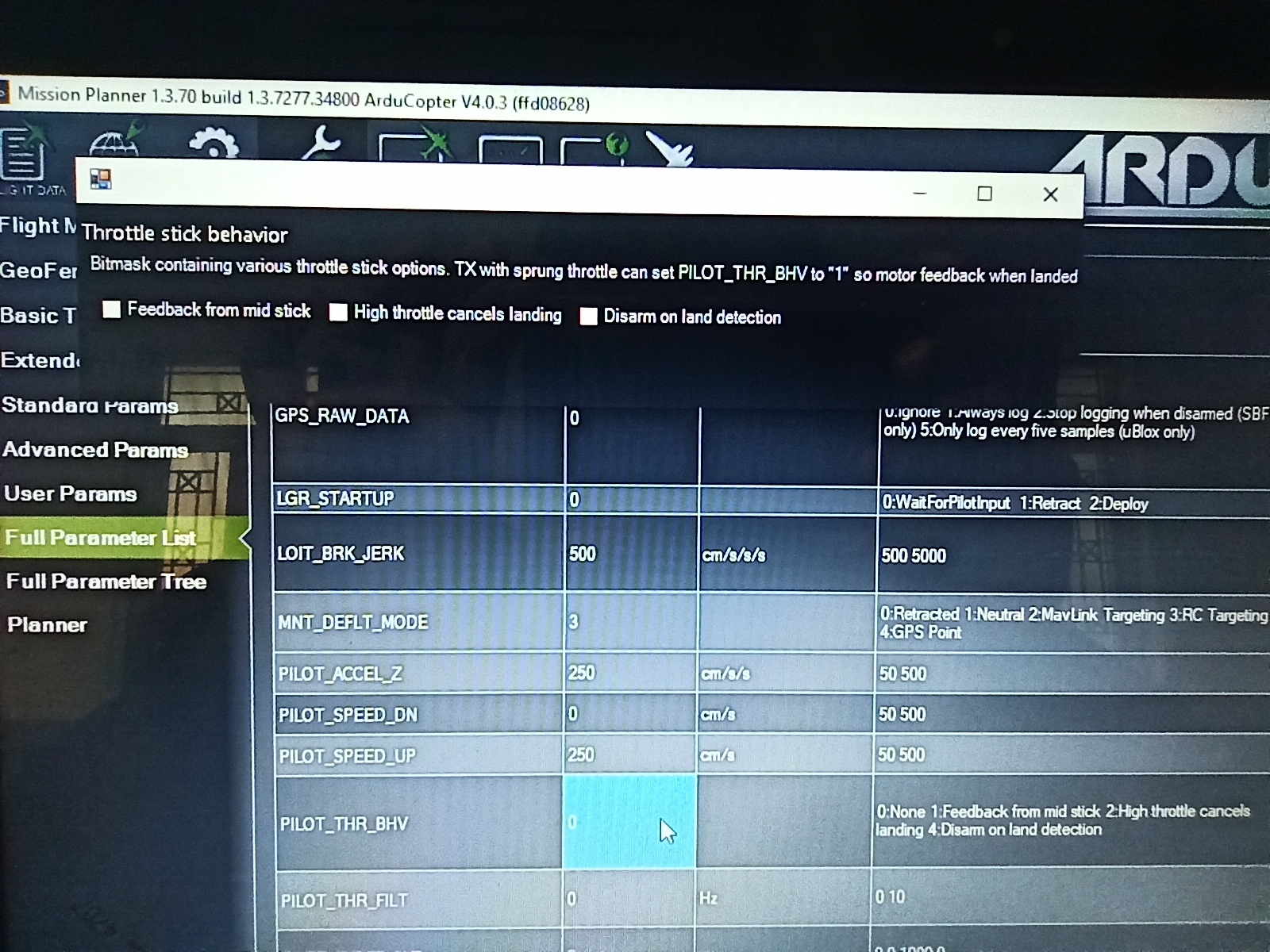
Check all three boxes, and you’ll see the value of the parameter becomes 7. Or just type 7 for the parameter. 7 is the value of all three bits (1+2+4). Then write parameters.
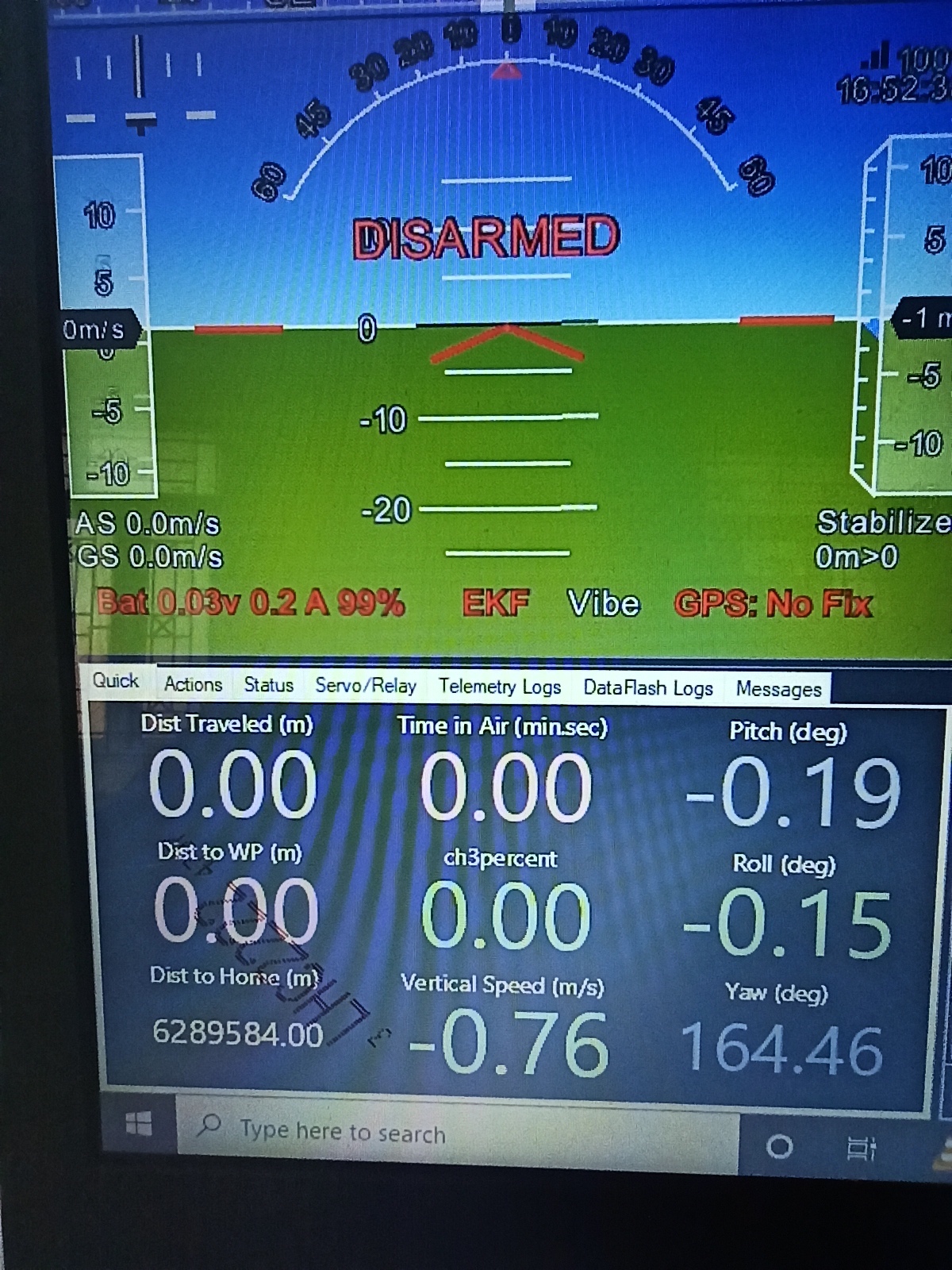
The hover throttle looks normal, so that part appears to be working fine.
If I set bitmask to 7 and I armed copter then leave the stick from bottom to high slowly, what would be the takeoff throttle percentage as I mentioned in my quarry?
The “feedback from mid-stick” bit is what fixes that for you. It will not start throttling up for takeoff until you push the stick up above the middle.
I have set parameter to 7.but still throttle start at ch3 percentage at 5.any other parameter I’m missing?
It should go to minimum throttle as you come up from the bottom. Then start throttling up for takeoff once you go above mid. If you’re getting any other behavior, I suggest redoing the RC Calibration.
I done rc calibration and tried again but its start throttle at 5% not at mid throttle.
Yes, that’s what it is supposed to do with a spring throttle. Then once in flight, it will work like a normal throttle stick.
It was worked as normal stick only before even I was not set PILOT_THR_BEHAVIOUR to 0 value. There is no difference between parameter set or not set in this scenario.
Here really I wanted to have throttle response as like dji light bridge tx.
Upto 50% throttle copter will not takeoff and once reached above that it start climbing up. Then it hover when never is it center stick.
Yes, that’s what it is supposed to do, and what I said before. Can you describe in detail what you’re doing and what the copter is doing in response?
BTW, this applies modes with altitude control like Alt Hold and Loiter. If you’re in stabilize, the stick works like any other throttle stick normally would.
What brand and model is this transmitter?
Why can’t you take the spring off of the throttle?
Hi, How are you supposed to do RC calibration with a centred stick? Should i move and hold Extreme up & again move to extreme down? Please clarify?
Hi thanks for this information on centre stick throttle.
As mentioned in stabilize mode with PILOT_THR_BHV set to 7 the stick will behave like any throttle response in STABILIZE Mode.
If I want to do the first maiden flight with the centre stick transmitter skydroudvT12 can I set to ALTITUDE HOLD mode and take off? Will it learn the hover throttle in this case?
Thanks