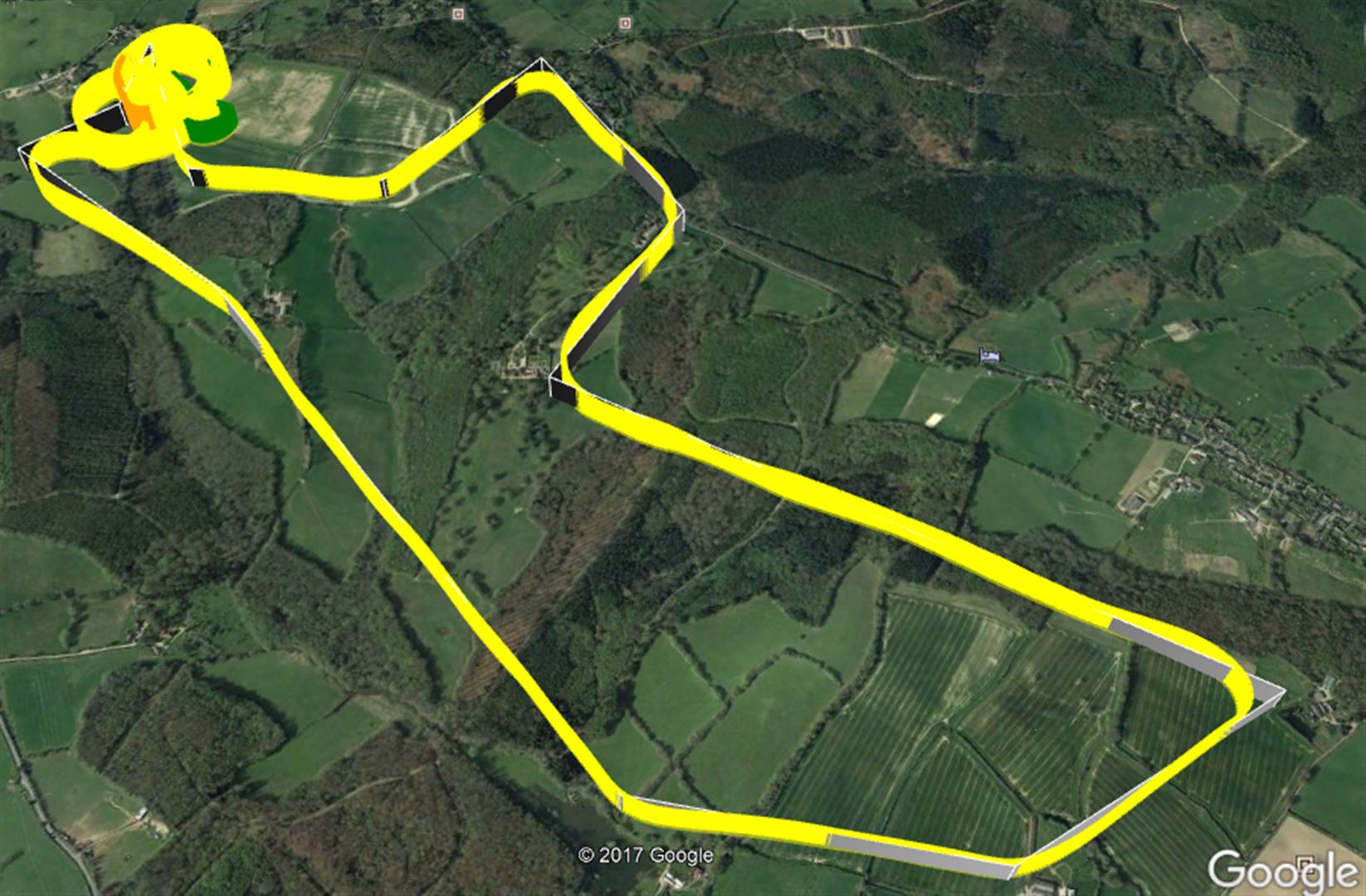
Autotune on Pixhawk went well on Talon - see copy. First autonomous flight good. 4.5 miles with pretty good tracking as you can see on kml overlay. Slightly overshooting waypoints.
Any ideas what tweaks I should make to PIDs to stop overshoot and slight weaving down straight sections?
Yes, but you should strive to understand the PIDs so that you can achieve your desired result.
The roll PID controller is what attempts to keep the wings level (or at your desired bank angle) in the presence of disturbances (e.g. wind gusts). A well-tuned roll PID controller will more closely maintain the desired bank angle under identical wind gusts than a poorly-tuned one.
In practice, controller tuning is a trial-and-error procedure. I encourage you to begin googling to understand what PID control is, then experiment (carefully!) with tuning your PIDs until your plane flies well.