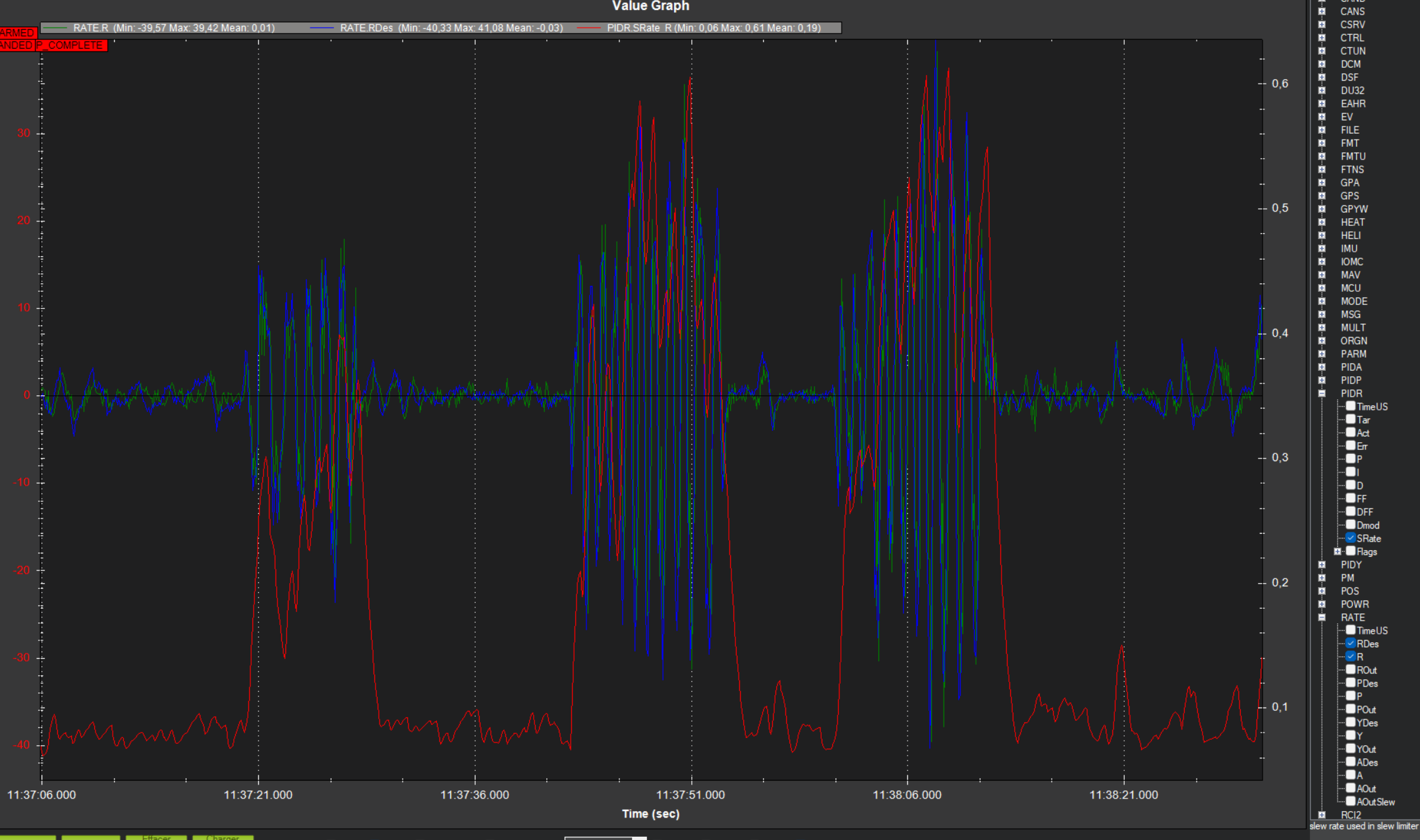
After flight checking the dataflash logs at pidR,
is see that slew rate (blue curve) goes up, and it’s action seems stopping the ff contrôler action inducing this jerks…
checking the logs it seems to me that srate act in the loop through rate d…
This is fresh tandem heli I build with rigid heads rigid linked to rigid metal servos (on the other post is same type but with plastic soft damped heads with soft servos plastic linked.)
Bellow the link for 2 logs:
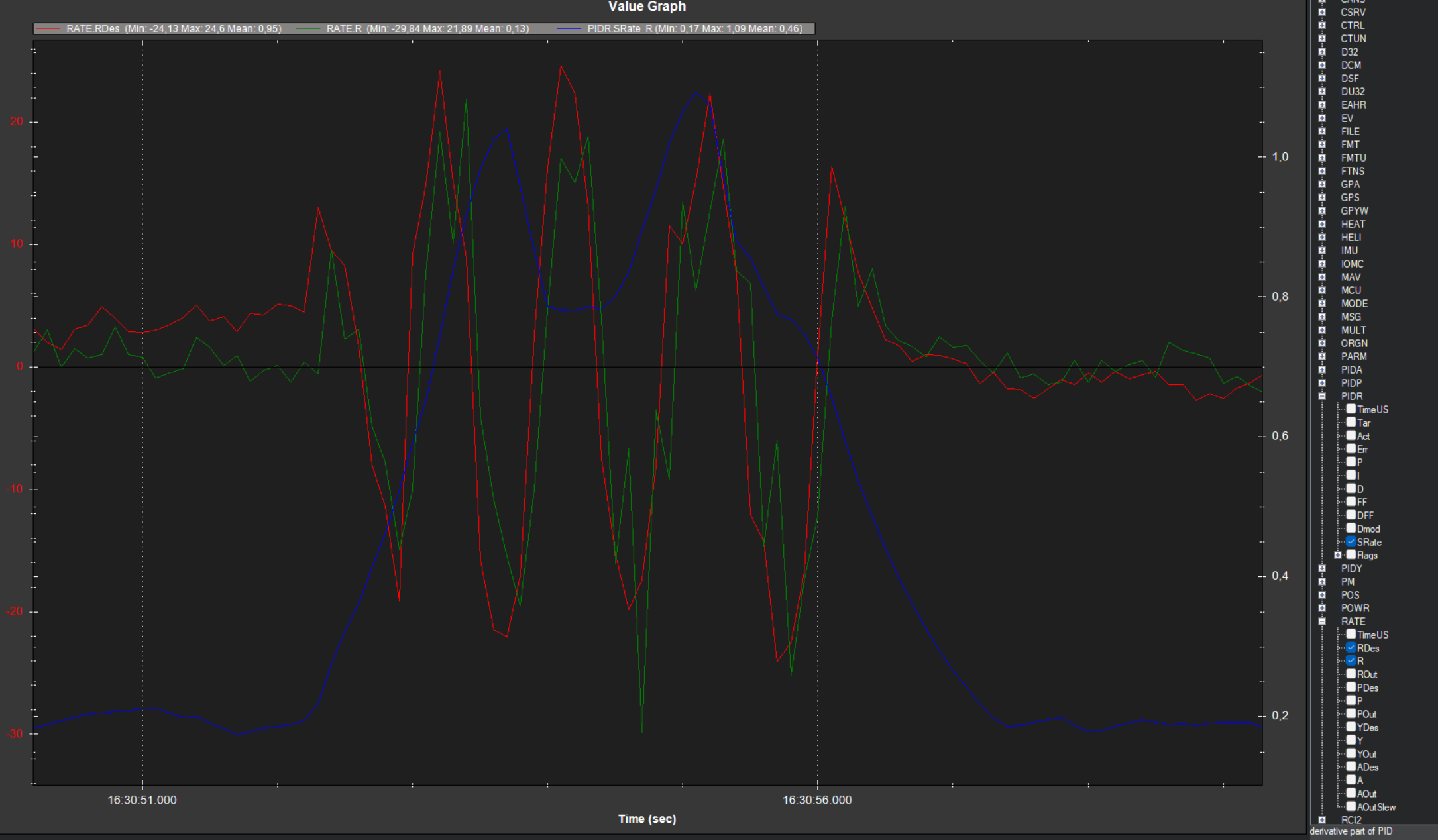
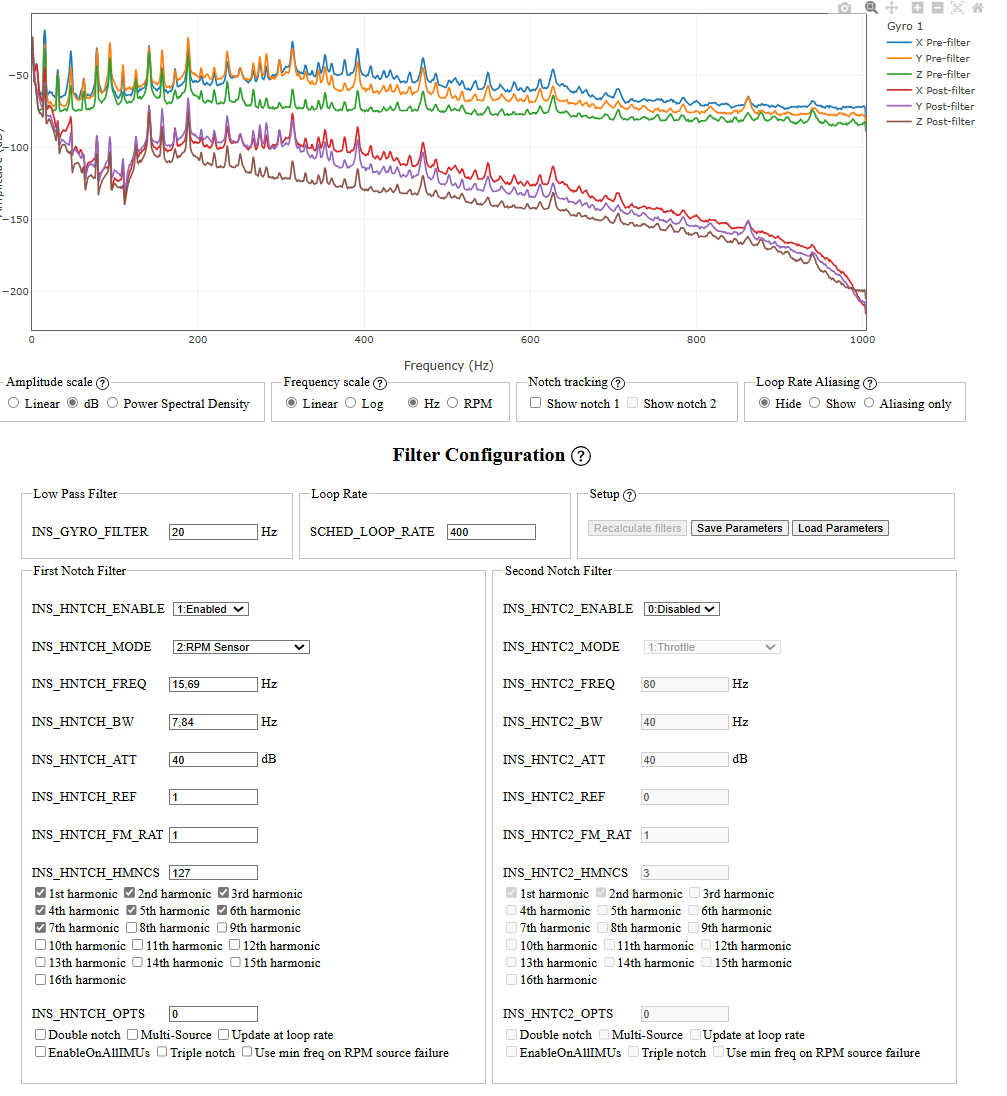
The first with the raw vibe analys: 00000033.BIN
The second one with little commands on roll pitch yaw where I see the jerks on the roll: 2024-10-03 16-28-21.bin
I’m thinking to simpli test today with FLTT and FLTE low pass filter @ 14Hz.
Also on this setup imu is hard mounted on the frame.
I just want to fix this jerk, tune it for good control in RPY, and make the roll pitch yaw SID.
Update:
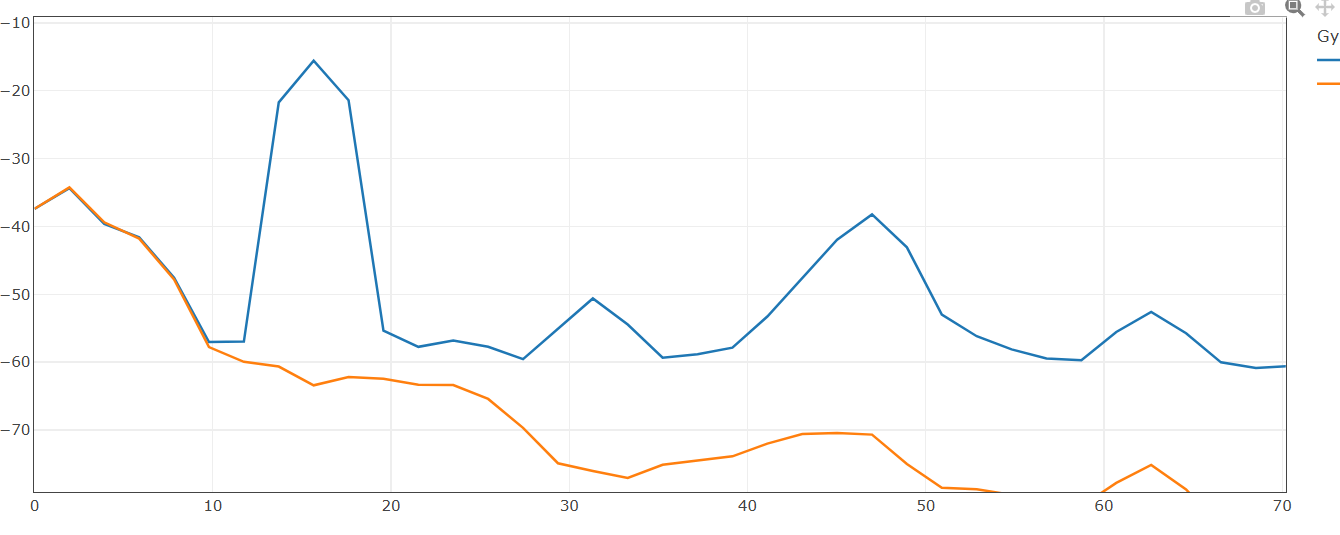
Make the flight with FLTE and FLTT, and I see the the jerk is smoother, but is present: 2024-10-04 11-35-47.bin
and the slewR, continuous to be @t High level
looks that with then new notch setup I have less jerks on the roll axis, but it’s not perfect and you see the twitches when you look the heli in flight, so I do not understand from where come the Srate.
Maybe I need to isolate the pixhawk with dampers ?
Slew rate in the log data is showing you how fast the servos are moving for the requested output from the controller. It’s mainly used to determine when feedback instability occurs due to over tuning.
Vibes are fine. I don’t think it is linked to the noise your are seeing at 15 hz. Most likely this is a feedback instability. I’ll know more when I look at the data.
You only need dampers if the vibes were high. I think your vibes look pretty good.
I really think that your gains are too high but I won’t know which one until I look at the data.
Today I make other flights trying to keep out of this jerks on the roll axis, I reduced rate p and d to 0.007 and 0.0007, and this not changed anything.
I always have this jerks on the roll
So I suspect that ff controller make that,
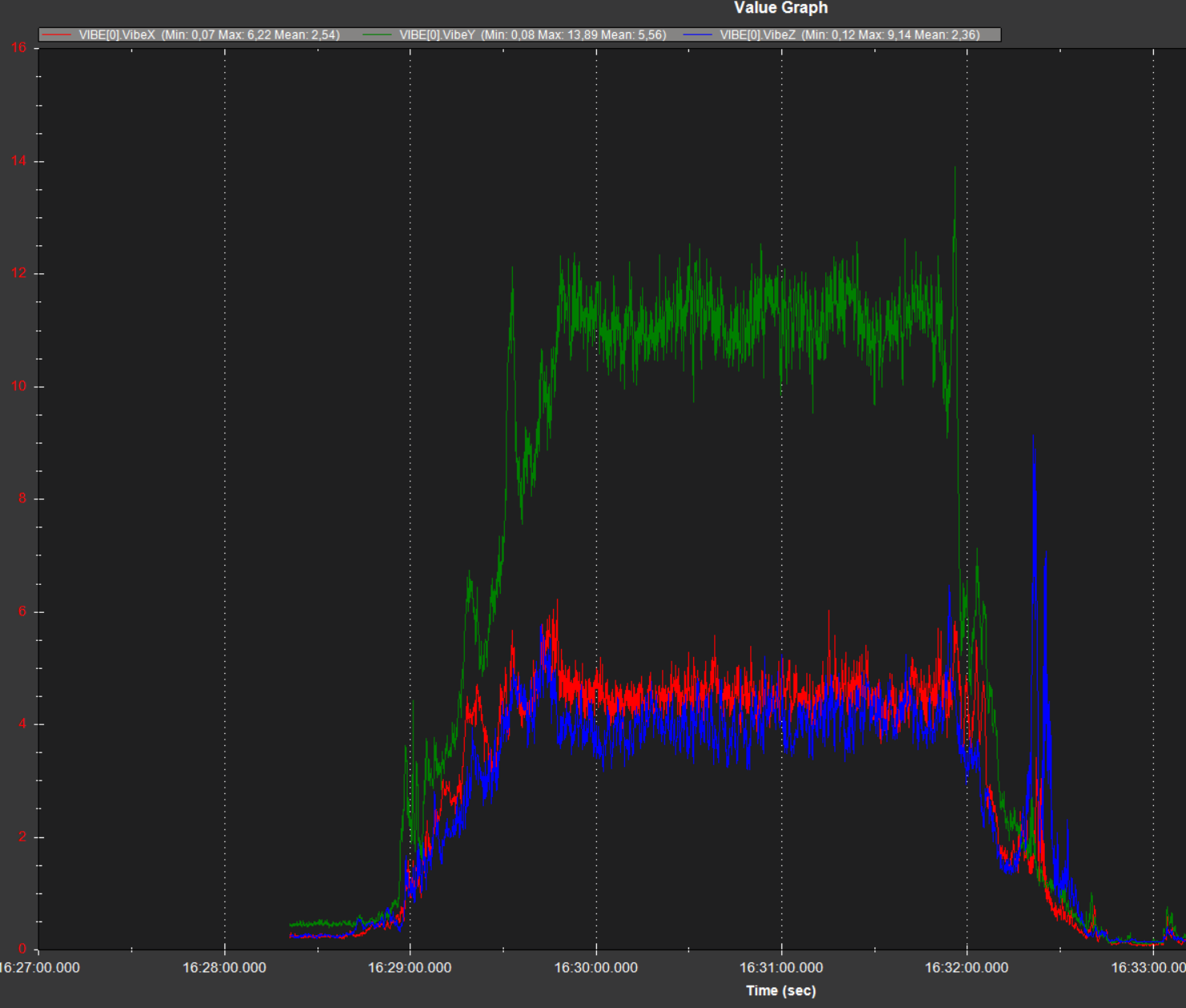
I make flight lowering ff from 0,18 to 0,12, this reduced the jerks, but when I see in the rate logs r measured is 3/4 below rdes.
Do you think that I must go farther reducing ff to make that roll jerks disappear?
Due to this jerks I don’t already make and sid flight.
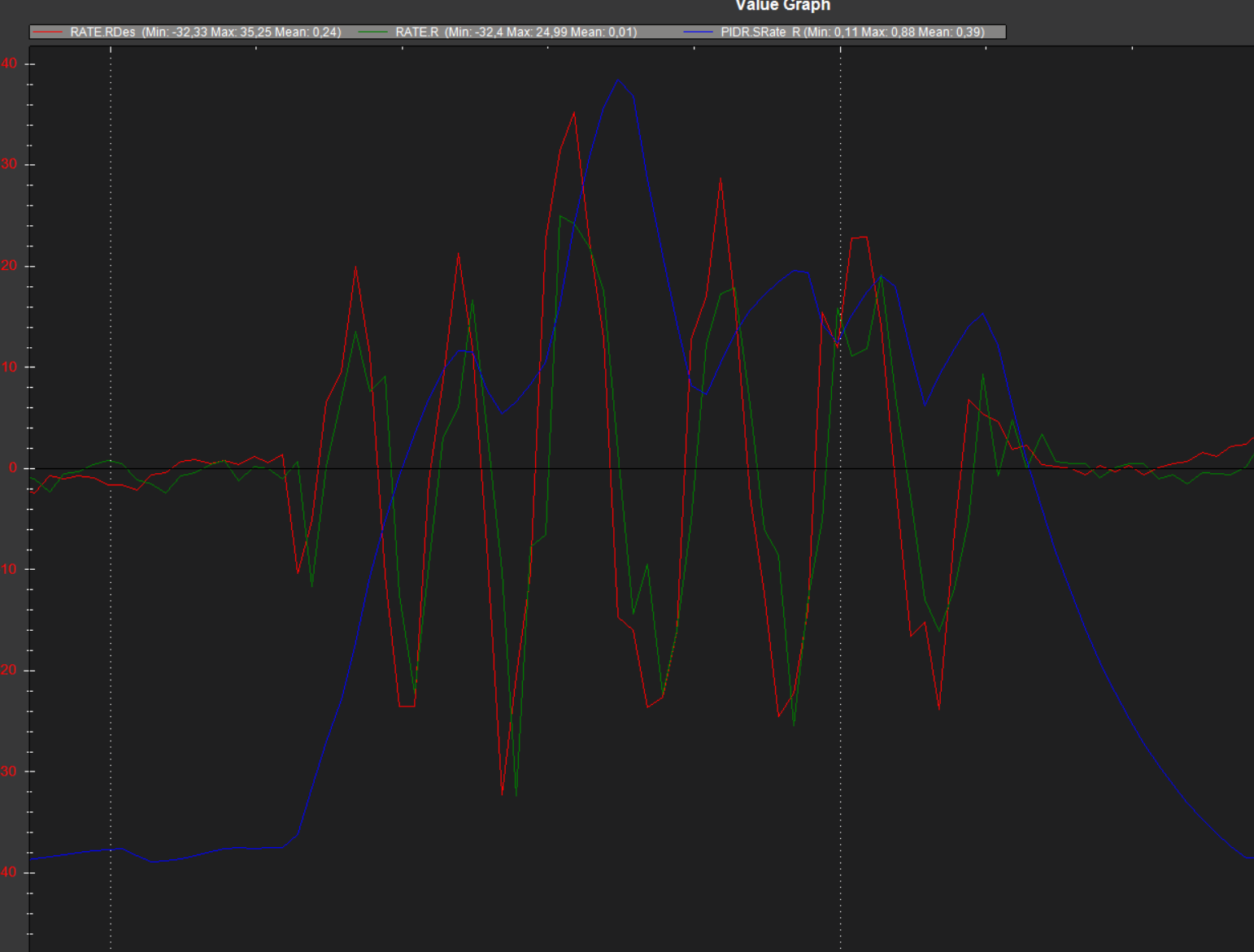
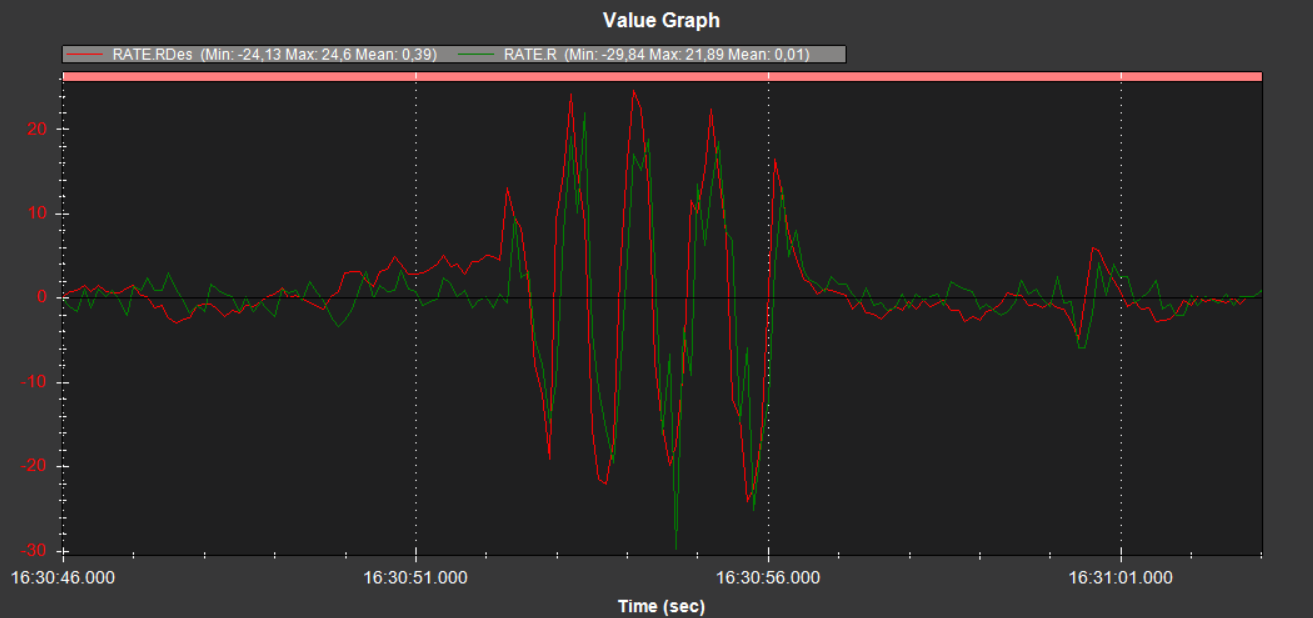
graph rdeas r meas for roll ff 0.18 P 0.01 D 0.001
After looking at the log, I’m pretty certain that the jerkiness is due to the Rate D gain being too high. Continue to reduce ATC_RAT_RLL_D until it goes away. I would recommend reducing it to 0.0001
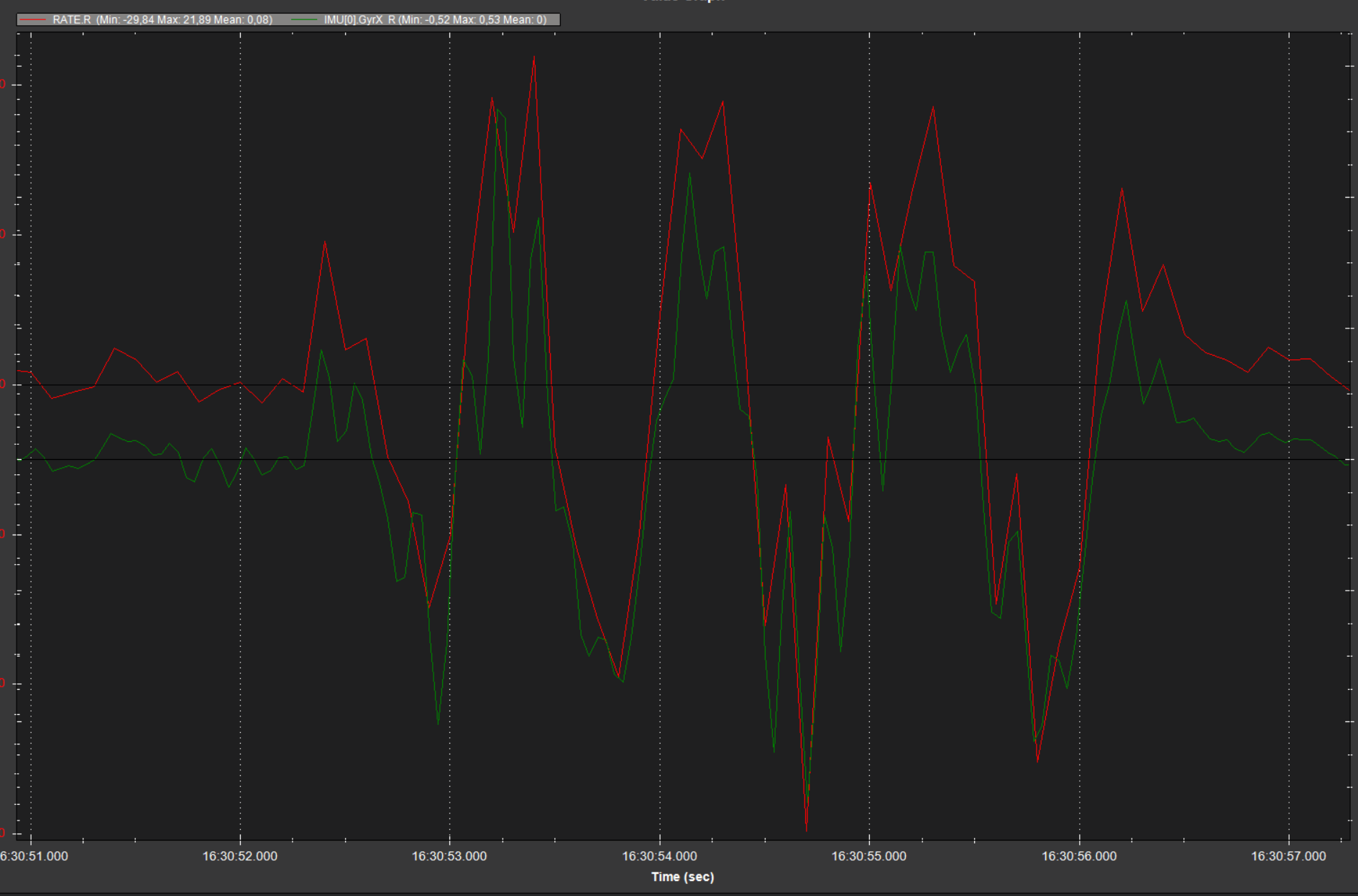
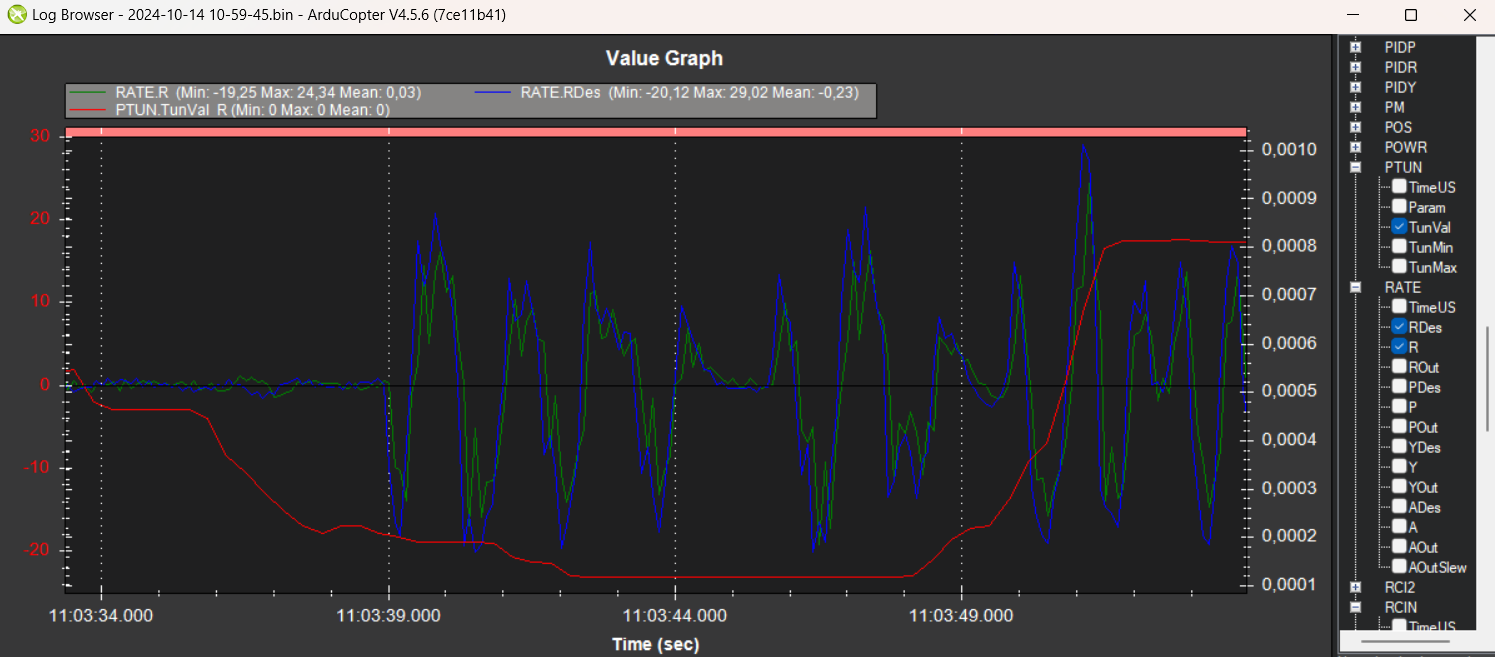
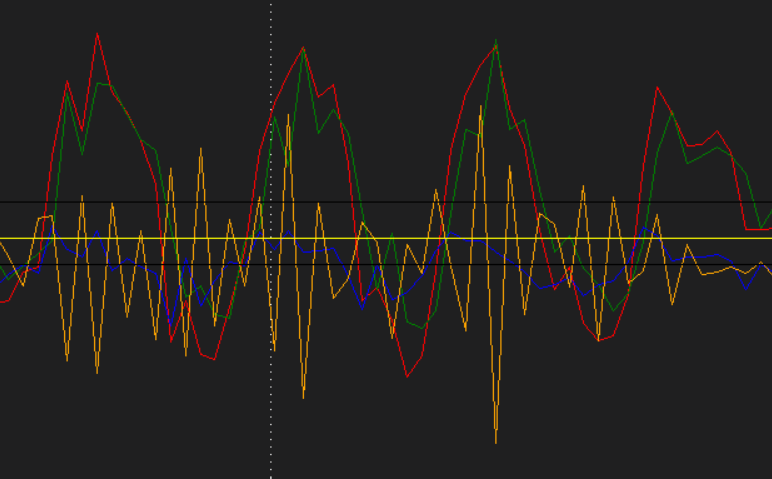
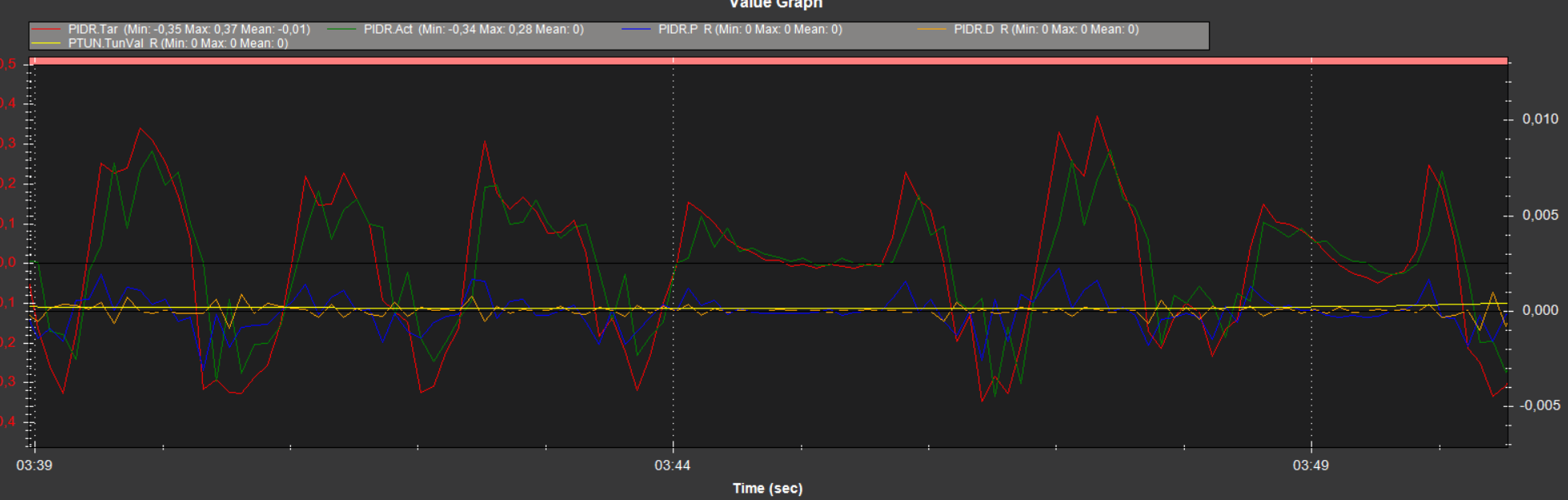
On the hardlinked dual heli I test today to reduct rat_rll_d to 0.0001, and I not see anything, please check below des rat vs meas rat vs ptun, we continuous to see the jerkiness…:
I will try to reduce FF and push rat pit d/p and stab pit p before retry.
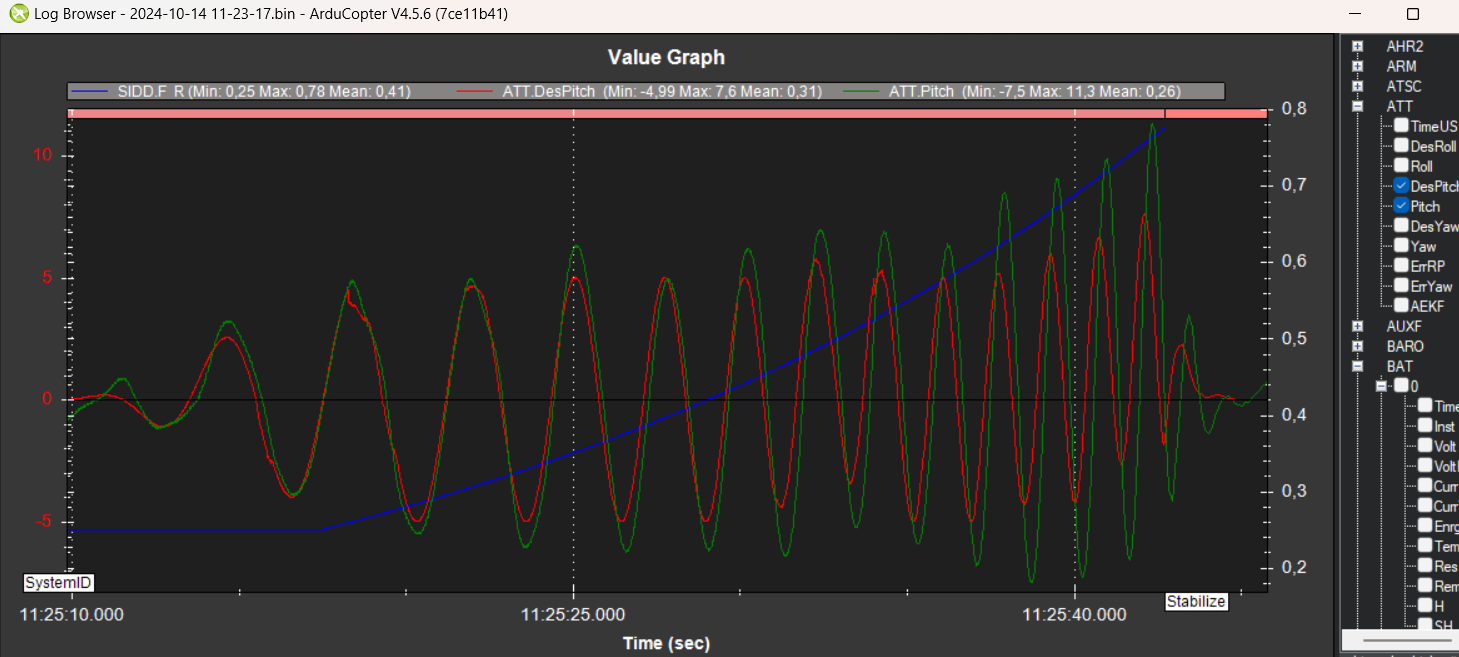
Maybe with this little one we can check on the analytics tune ? 2024-10-14 11-23-17.bin
Yes, use SID_AXIS of 1 (roll), 2 (pitch), or 3 (yaw). That will enforce the acceleration and rate limits.
These SID_AXIS values will do a better job of keeping the attitudes to the requested magnitude. If you feel that the attitudes are still too high, reduce the SID_MAGNITUDE to 2 or 3 deg
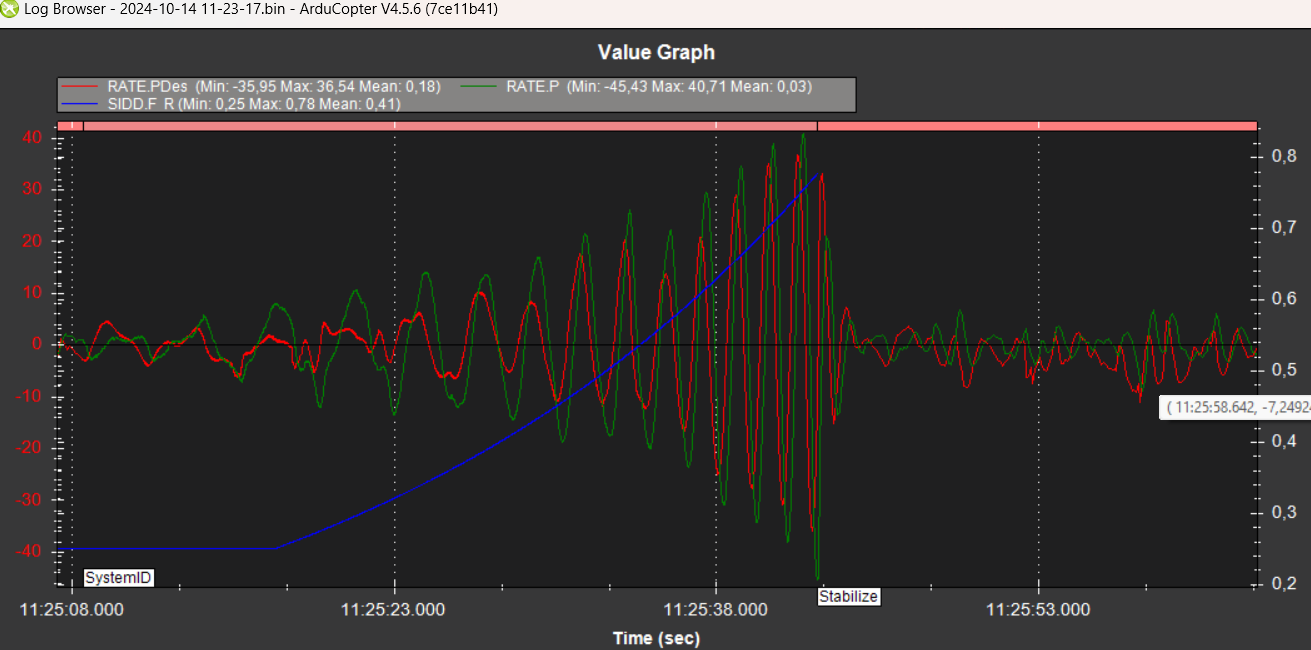
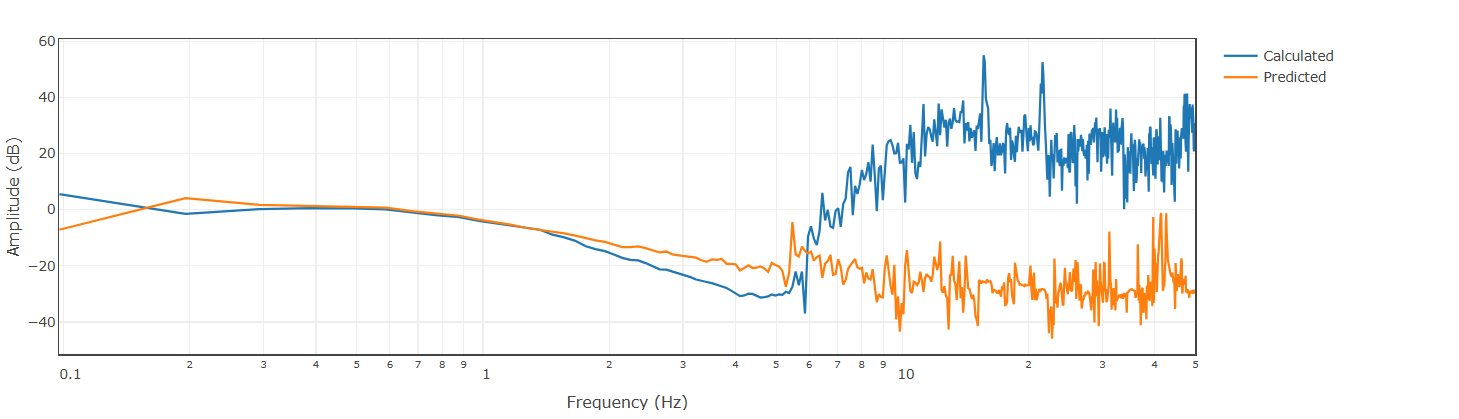
@kuspower Sorry for the slow reply. Just coming back from the conference in Japan. I don’t think you can trust anything from that system ID run. The frequency just didn’t get high enough. I would suggest you use the SID_AXIS 2 for this. Set the SID magnitude to 3. Hopefully this will allow you to collect data throughout a frequency range from 0.5 up to 5 hz. We really need it out to the frequency where you see 270 deg of phase with good coherence.
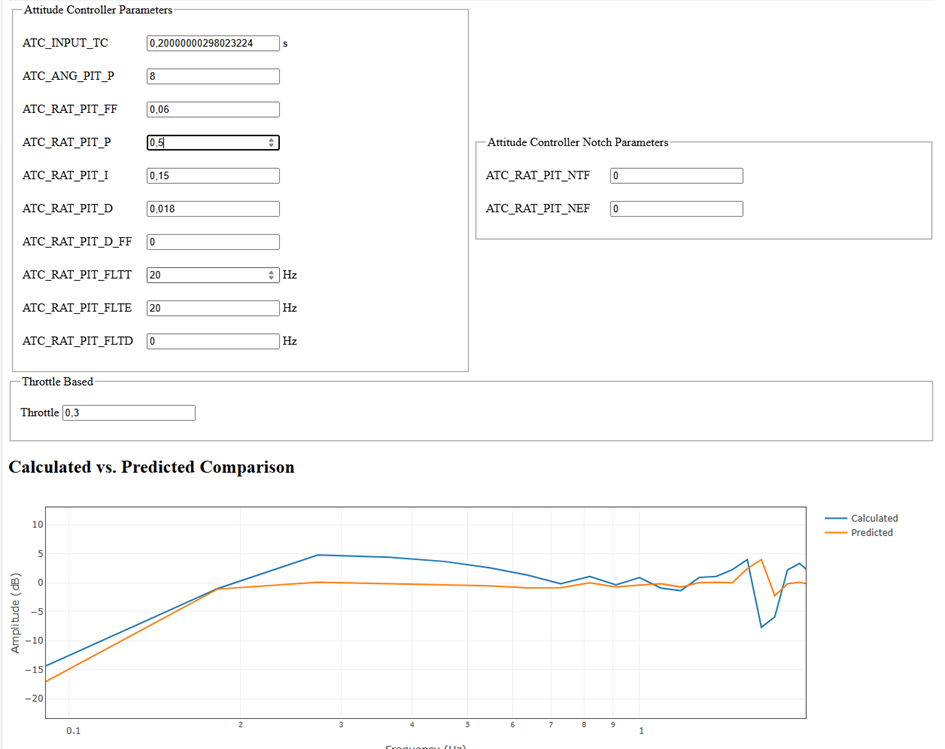
Looking at your parameters, I would suggest that you bring down the Rate FF gain and raise the rate P gain by the same amount. So I would suggest stepping Rate FF down to 0.14 and rate P up to 0.06. Fly and make sure the low frequency is stable.
Then step Rate FF to 0.11 and Rate P up to 0.09. Then fly and make sure it is stable. You might keep the Rate P gain on a know to ensure you don’t get any bad oscillation. Take one more step to Rate FF of 0.08 and Rate P up to 0.12.
if that all goes well then try the system ID mode again.
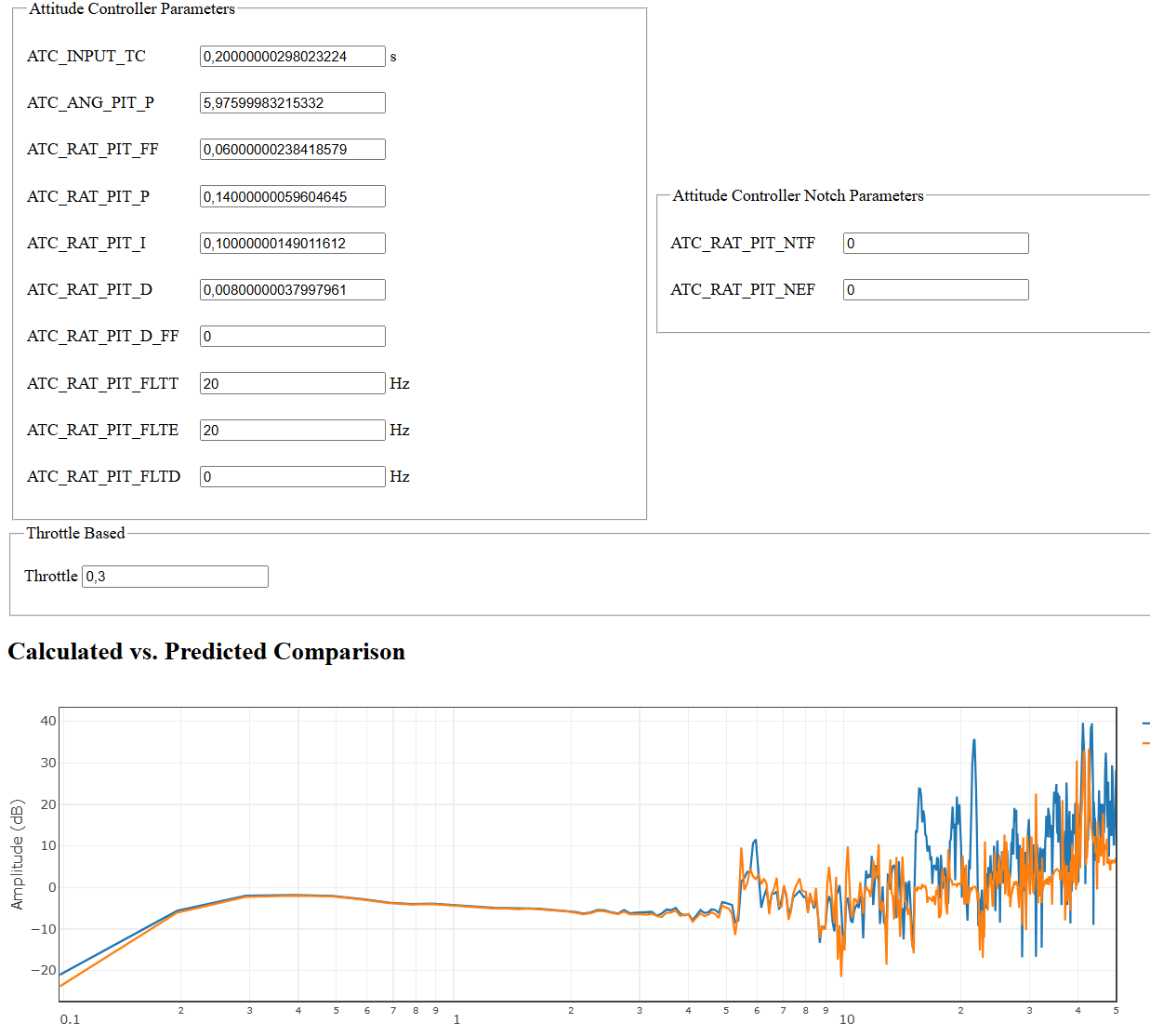
It definitely looks better. Conduct the System ID for pitch again but this time set the SID_F_STOP_HZ to 10. It is not capturing the high frequencies that I want to see for the effects of the Rate D term. based on my estimates, i think you will be able to bring up your Rate P more. but I want to be sure that we capture these effects at the high frequencies.
It looks like the acceleration limits in the Feedforward may be reducing the signal and that is why the coherence drops around 4-5 hz. I wouldn’t go much further in changing gains until we understand what is happening at the higher frequencies.
Hello Bill,
I try to redoo a test asap to 10Hz to get the 270° response phase.
To minimise the risk, In case of resonance during the test, do you advice to set ch6 knob to reduce p or d ?
After tuning the yaw PID in 3 flights with CH6 knob from
FF 0.05 to 0.000
RAT D 0.002 to 0.025
RAT P 0.19 to 0.33
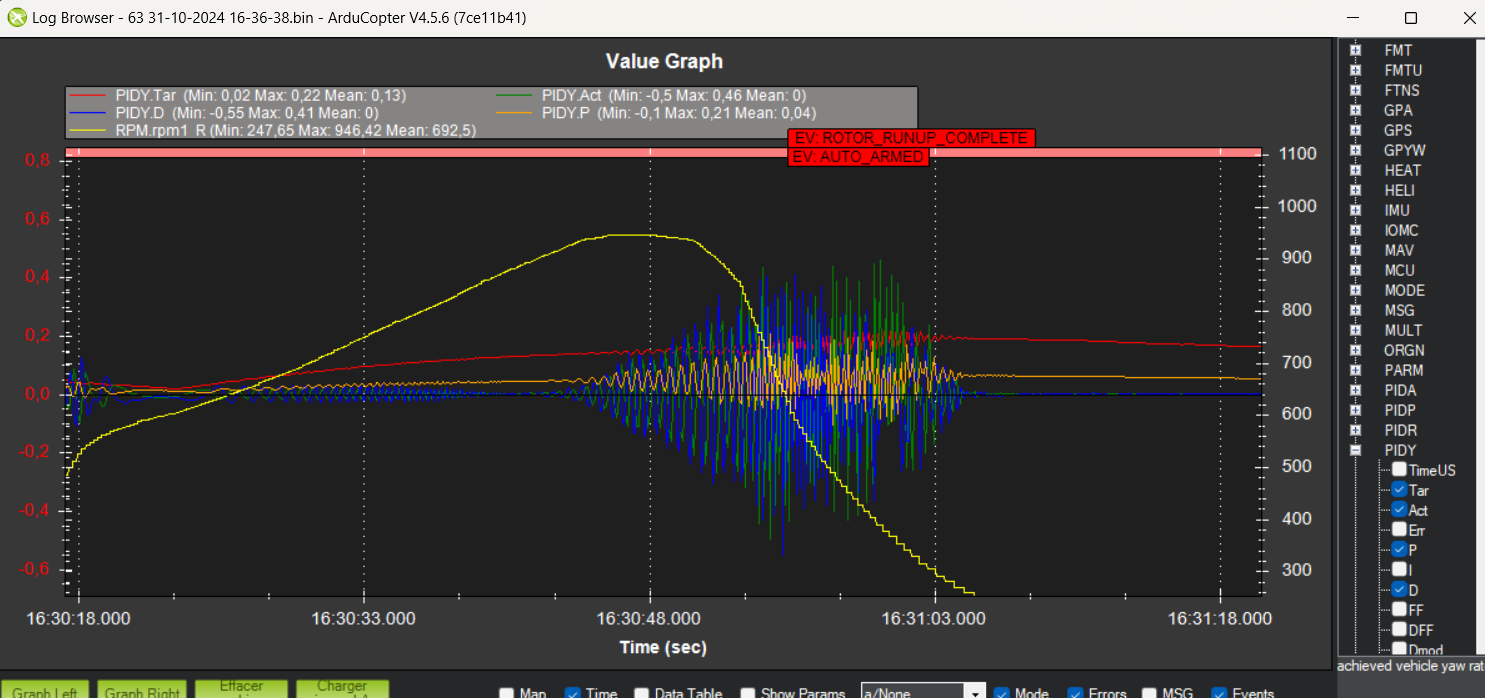
and after 3 perfect flights with this setup, I had a yaw resonance during the ground run-up, I got scared, and immediately cut the engine.
I had many chances to not brake anything…
You can see below the 2Hz resonance increasing and the RPM curve in yellow.