. Based on the experience with betaflight and inav where you can use the PID analyzer tool to evaluate PID tuning, I thought that a substitute for this could be done for the arducopter. We can try to ask the PID creator anayzer to save log files for betaflight or txt for inav also for the arducopter log file Of course, something should be done to register RCIN and ATT logs and flight test in stabilize with high frequency. We can also try to create such a tool ourselves.
My question is: at what frequency are we able to register RCIN and ATT simultaneously?
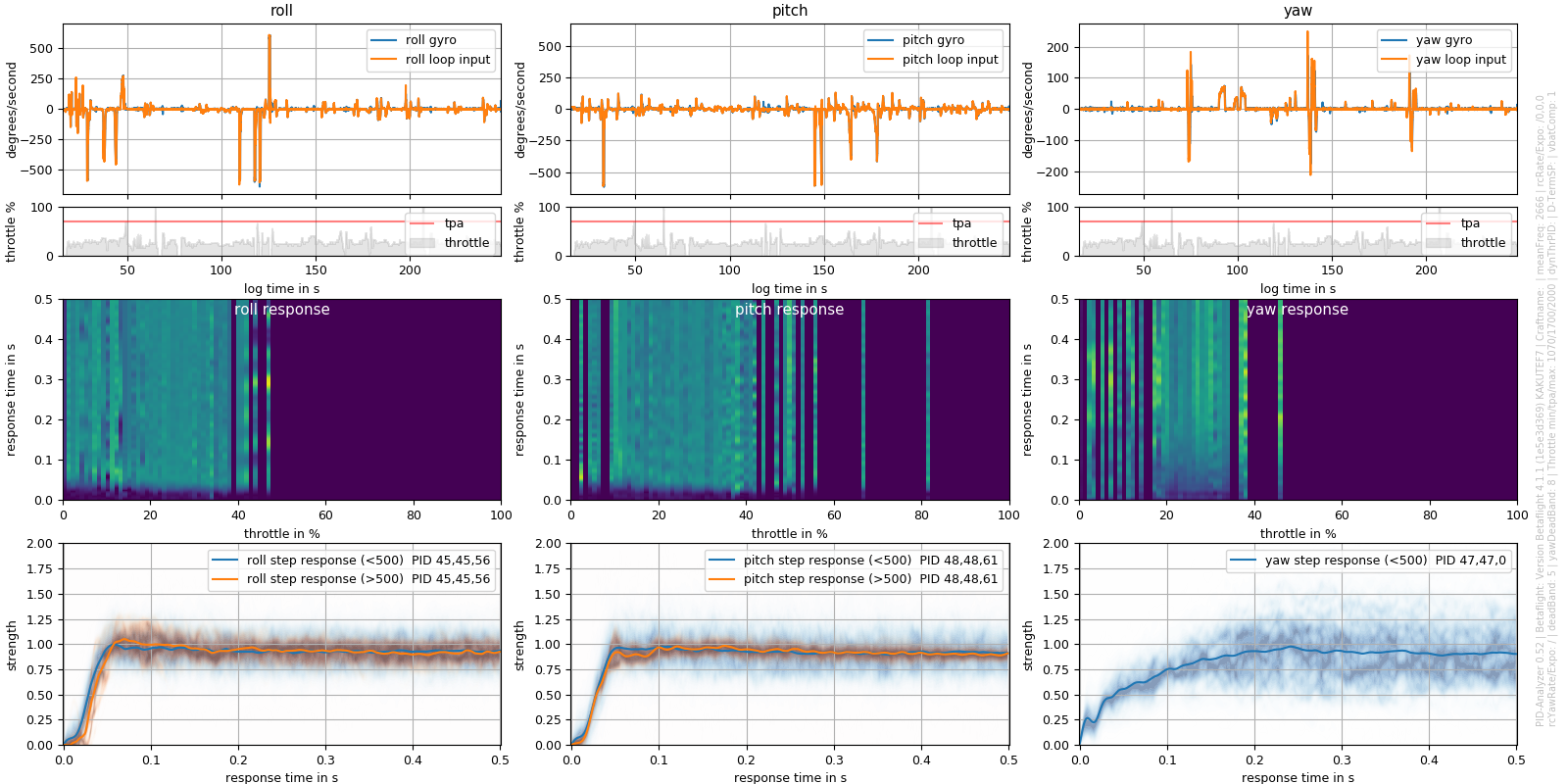
Attached is a screen from my kakutef7 on 8-inch propellers and a betaflight from RPM with a well-tuned roll and pitch and so yaw.
I’m interested in the same thing as you. I’m new to Ardupilot code base so just want to ask what is different between Ardupilot and px4 now in term of logging data ? (logging frequency, PID frequency)
I suppose that if we can provide the right parameters to flight review with enough amount of data then PID analysis would work. Am I right ?