Not knowing how to adjust PID gains in high-speed flight, the P, I, and D pitch gains were lowered to the limit.
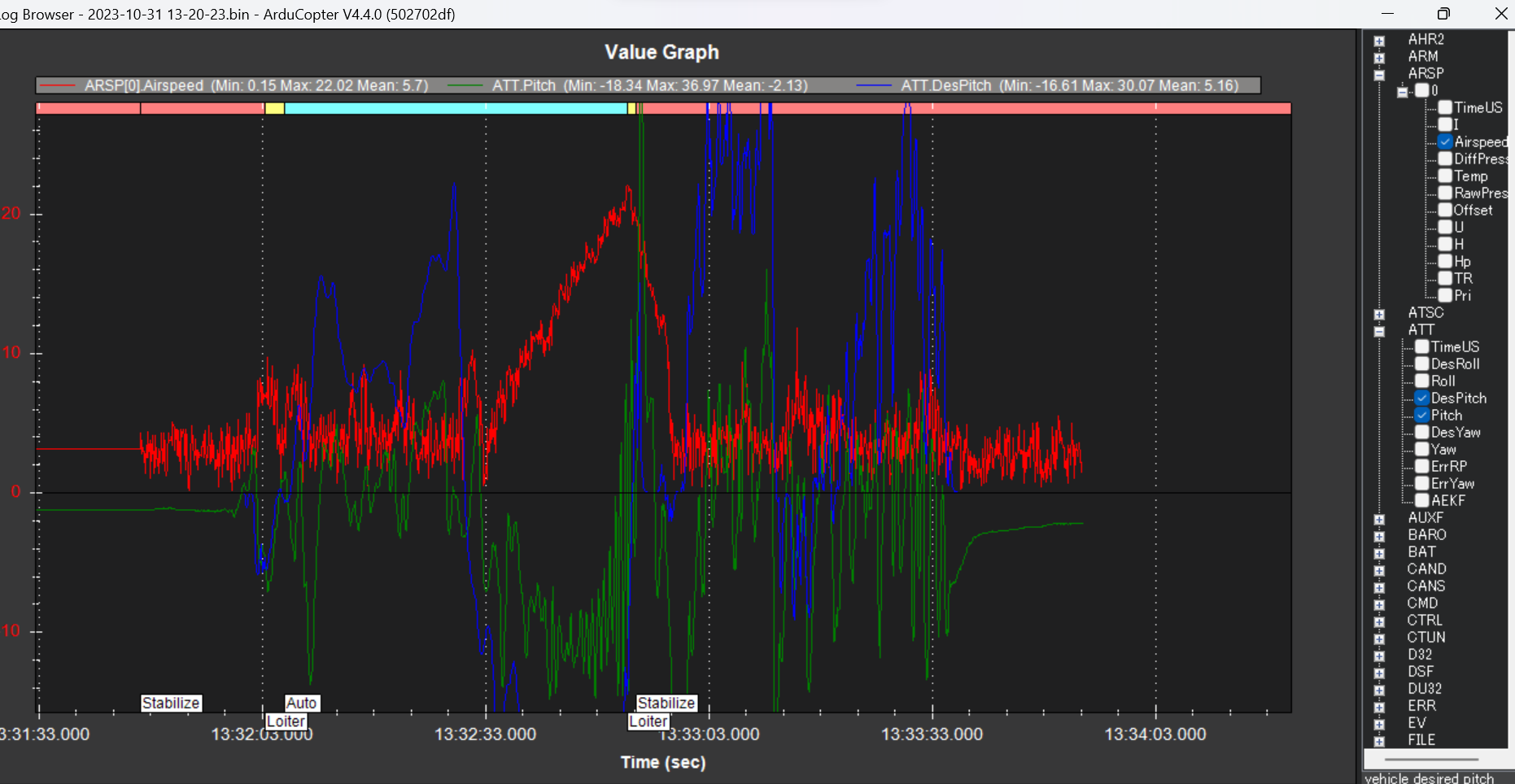
But the pitch oscillation is too large.
Post the .bin log.
To me the error looks to be in phase with demand though the most interesting part of the data is missing. To me this indicates that poor target tracking is due to too low gains.
Please also post a log of a flight where the high speed stability issue is visible.
I agree with @LupusTheCanine. It seems to me that the attitude controller was not tuned well in the helicopter. I would recommend not continuing to test high-speed flight in auto mode until the attitude controller is properly tuned in stabilize mode
1 Like
Thank you LupusTheCanine,Bill Geyer
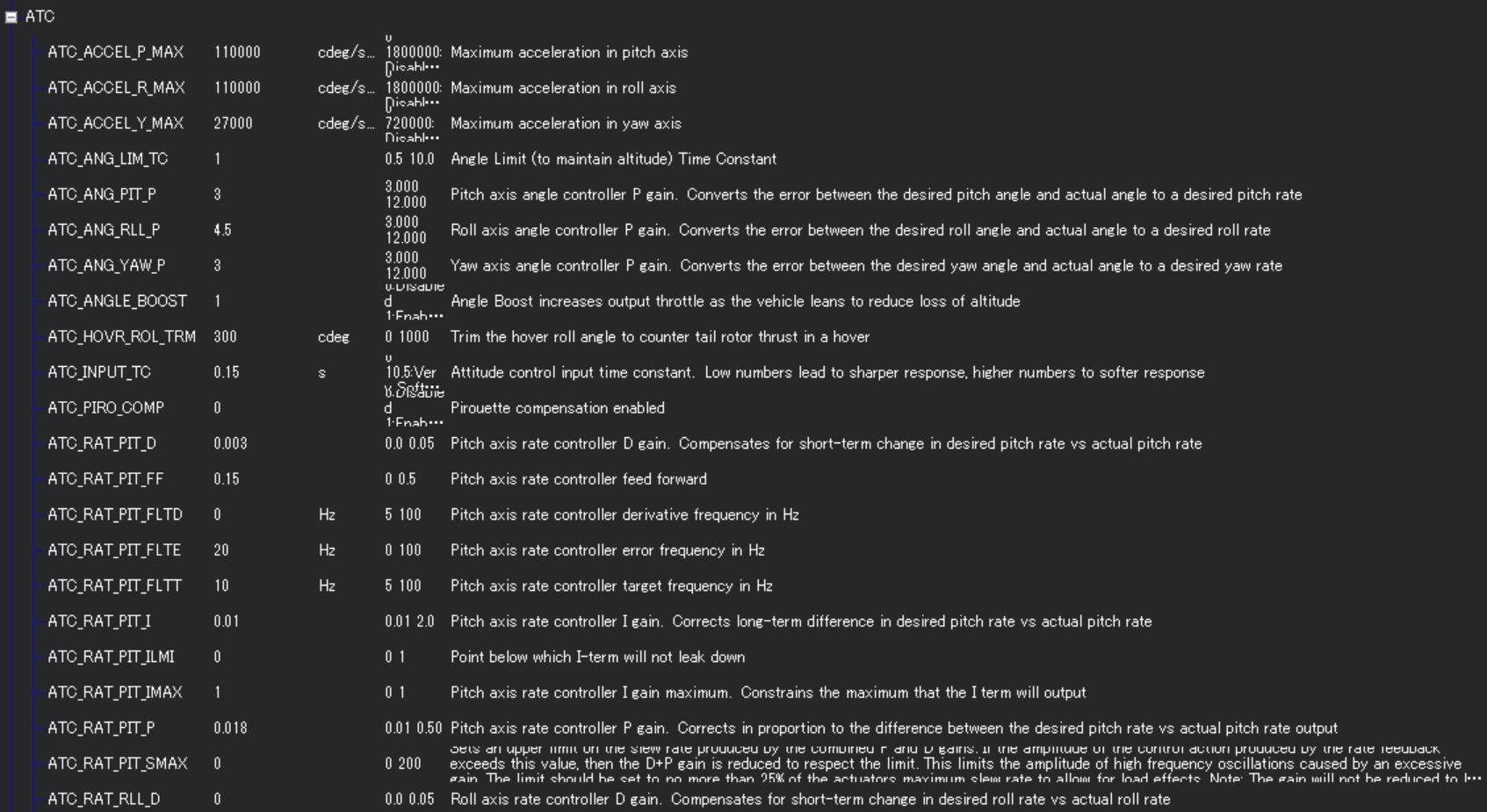
The PID gain of the pitch was close to the limit and small, as shown in the picture, so the pitch oscillation increased as the speed was increased.
Which value do you think should be adjusted?
Blockquote
The places adjusted are P,I,D for pitch rate, P for stabilize pitch, P for loiter rate, I for loiter rate, and P for altitude maintenance.
The flight mode was switched from stabilize to loiter, and high-speed flight was performed in auto mode.
The aircraft is PROTOS 380XL

What do you mean that the Pitch PID gain was close to the limit? How did you determine the limit?
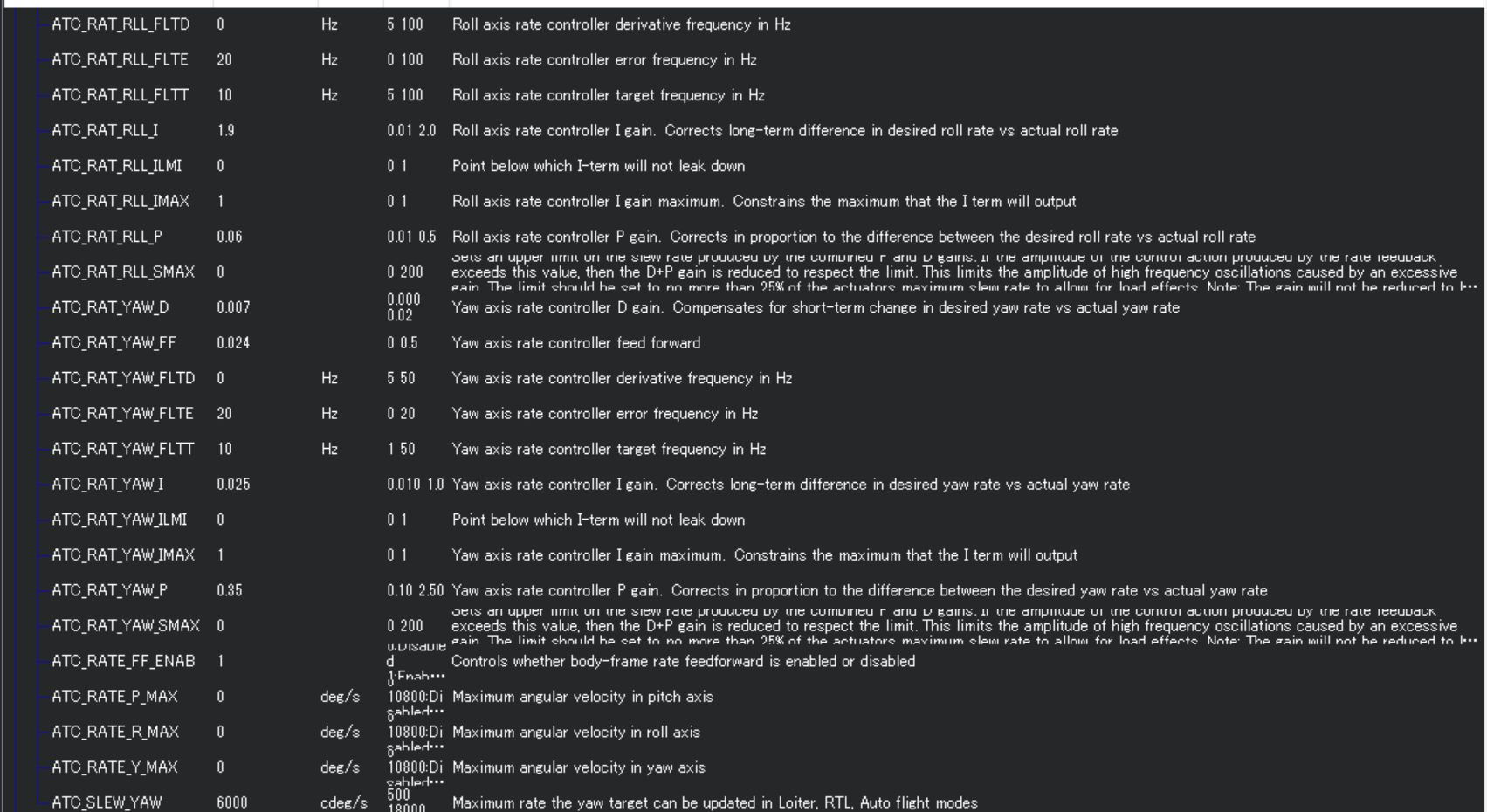
Your roll PIDs are not tuned well either. why do you have the Rate I term at 1.9? It is not good to use only I gain to control an axis. It will cause a lot of lag in the response.
Have you followed the tradheli wiki for set up and tuning? The INS notch filter was not set up.
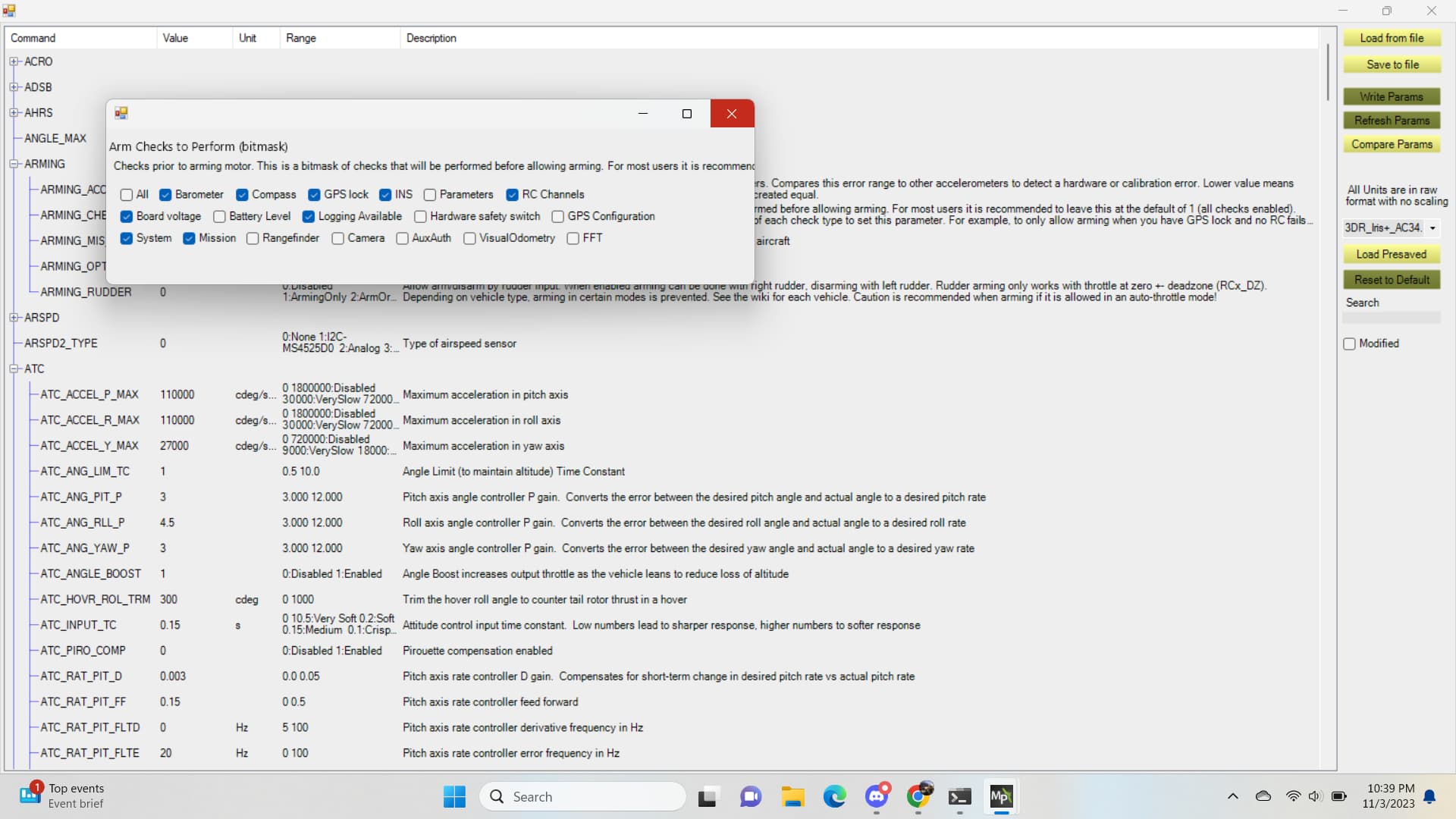
This is not good. You should not turn off the arming checks! You have missed some critical set up procedures that the arming checks would have forced you to fix before flying. The most critical ones are:
H_COL_ANG_MAX
H_COL_ANG_MIN
You need to fix these before your next flight. You’ve been luck that you haven’t had an in-flight
motor shutdown. So please read the swashplate setup wiki and set up these parameters properly.
Follow the tuning wiki to properly tune the aircraft. If you have any questions on the Autotune feature, let me know.
1 Like
Is there any development happening for the autotune procedure in Arducopter trad heli? For now I tried with 3 different helicopters to autoune, but every attempt fails somewhere in between the tuning flights with no obvious reason or suggestion how to resolve this. I followed the WIKI to the letter in preparing but for me it’s basically useless and also for other members of my flying club who tried this.
The first step would be to share the logs where the procedure have failed.
@ojoo i am the original developer of the autotune feature. I can’t fix any problems unless I know about them. So please start a topic in the traditional helicopter section of this forum and include a log where you had an issue. Also include any background information of what you did to that point where you had an issue.
Sure I have done this already, send them to Bill Geyer the developer of the autotune feature, but I never received a useful answer, still stuck at the tuning process.
I will look back at you posts and see. I get pretty busy with other things but I will see if I can help you.