I’m setting up and configuring my second TRex 500 heli, this time a scale one with a 4-blade head. In the past it has been flying with a BeastX flight controller, programmed with 10 degrees of phase angle. I remember reading somewhere that phase angle can be congifured with Ardupilot, but on searching the wiki I can’t find anything about how to do it.
@abenn1 you have to use the generic swashplate. Once you enable that then you can set the phase but you also need to set the servo positions or at least make sure they are correct.
… but the _H3_SVx_POS and _H3_PHANG weren’t initially appearing in the parameter list, even though I’d set the swash to H3 generic, which had me confused for a while.
Thank you Bill (and others) for your help. All appears to be correct now; in MP I get no preflight warnings, but there’s one small thing that still bothers me.
When I power up the heli it doesn’t seem to go through as many cycles of the servo movement checks as it does with my first heli. Cyclic servos only go up and down once, and the tail doesn’t seem to move at all, yet they all respond correctly to stick inputs, and to movement of the heli. Should I be concerned?
Here is the param file, in case anyone is able to spot something that I should change before I do a test flight.
I’ve been comparing the log file in my previous post with the one from my other TRex 500 which has been flying nicely for a while. Obviously there’s several minor differences due to the slightly different layout and the different hardware, but there’s a couple I don’t understand:-
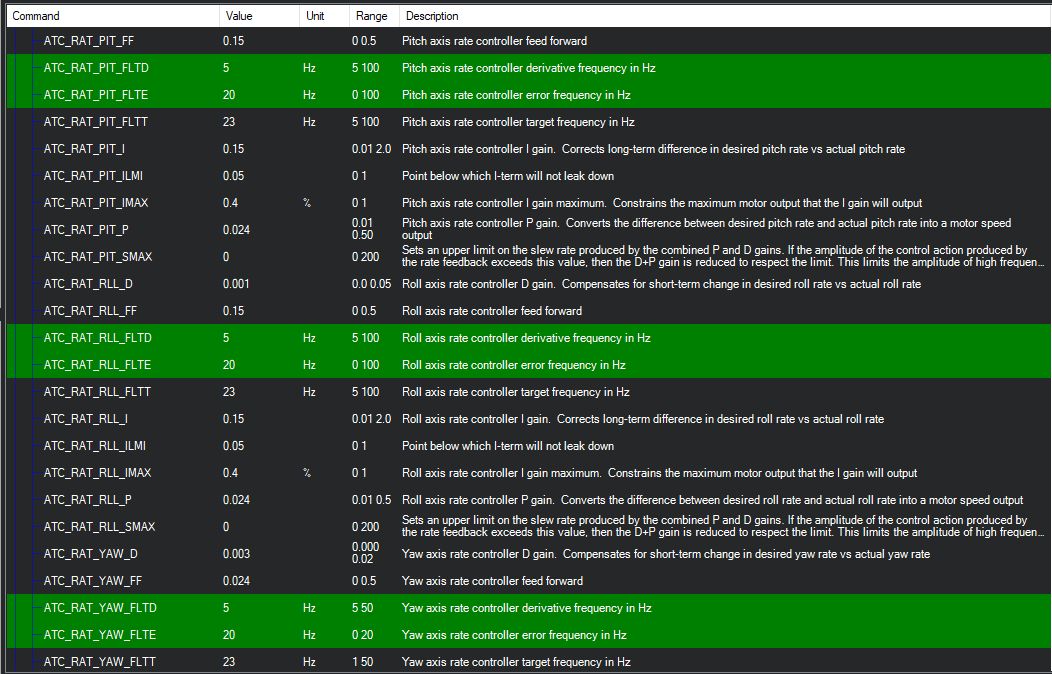
ATC_RAT_PIT_FLTD is 23 for this new heli but is 0 for my other one
ATC_RAT_PIT_FLTE is 0 for this new heli but is 20 for my other one
ATC_RAT_RLL_FLTD is 23 for this new heli but is 0 for my other one
ATC_RAT_RLL_FLTE is 0 for this new heli but is 20 for my other one
ATC_RAT_YAW_FLTD is 23 for this new heli but is 20 for my other one
ATC_RAT_YAW_FLTE is 2 for this new heli but is 20 for my other one
Do these transpositions of the _FLTD and _FLTE values, indicate a problem, or do they simply arise from the different hardware I’m using (both machines are using Arducopter 4.2.2) and/or the fact that my new one is using H3-Generic swash while my old one uses H3-Y?
the servo test (H_SV_TEST) is set to zero so it should do any cycling of the swash or tail rotor servo.
It doesn’t necessarily indicate a problem and has nothing to do with the swashplate or different hardware. Was this controller loaded with ArduCopter firmware before, maybe for a multicopter? Or another heli? Or did you use the basic or extended tuning pages in mission planner. These could have caused changes to your setup or carried changes from a previous setup. The default settings for these parameters should be as they appear below
ATC_RAT_PIT_FLTD is 0
ATC_RAT_PIT_FLTE is 20
ATC_RAT_RLL_FLTD is 0
ATC_RAT_RLL_FLTE is 20
ATC_RAT_YAW_FLTD is 0
ATC_RAT_YAW_FLTE is 20
So I am not sure how they got set to something different if this is a fresh install on a new FC.
Thank you Bill. The Matek H743MINI controller in the new heli came with Betaflight and was flashed with Arducopter Heli by me. I then went through the MP setup and tuning steps one at a time. I might have confused the software when, after I’d started manual configuration, I thought it would be quicker to load the param file from my working heli (they’re both TRex 500) and then tuning that. In the end I abandoned that idea and re-loaded the file I’d saved after I was part way through manual configuring, and then continued with config and tuning until all seemed to be working correctly.
So now, whatever the reason, I’ll set those _FLTD and _FLTE settings back to default. I’ll also correct the H_SV_TEST because it’s reassuring to see everything moving during boot up.
Sorry that is not true, It can be zero which means it is disabled. When it asks if you really want to make it zero then just say yes. I want the filter to be disabled on all three axes.
Ok, I saw the 'Out of range . . . . ’ message and noted that the range is specified as 5-100, so thought that 0 would be bad. I’ll change them to 0 before I fly. Thank you.
I have been flying helis for a long time. Over the years, I’ve gotten into the habit of testing all swashplate and tail functions before each rotor speed ramp-up. I also make absolutely sure that the servos not only move, but also follow the stick movements laterally correct.
What good are wildly twitching servos if they steer in the wrong direction?
With my habit you catch two birds with one stone. First, you see that the servos are working. Second, you see that the servos are running in the right direction.
The programmed servo test only lulls you into a false sense of security. Omit it and adopt the habit described above.
For me, the servo test is only a function when setting up the heli on the workbench, so I can see that the servos are not locked in their end positions. Not suitable for the pre-flight test! My opinion.
Thanks Heri. I see your point. Just like with my fixed-wing aircraft, I do a control check before each flight. But, for me, I think I’ll continue with the servo test for, if nothing else, it confirms that FC initialisation is progressing, especially with my scale helis where it’s impossible to see the status LEDs
I know this is an old thread, but I’ve just got around to flight-testing/tuning the heli in question, and have a query about phase angle:
This heli has flown for a few years using a BeastX FC and the same 4-blade head, and with the BeastX I had the phase angle set at 10 degrees. On a flight test yesterday with Aruducopter I noted unwanted roll when using pitch controls, and pitch when using roll controls. After bench testing this afternoon I determined that -10 degrees was the closest I could get to no unwanted movements.
If anyone else is using the Align 500 4-blade head, what phase angle are you using, please?
[GRIPE]It’s surely a direct function of the physical build of the head, so it’s a pity Align don’t give the angle in their specs – at least, not in the literature I can find.[/GRIPE]
no matter who a multi-blade head is from and no matter if it is a three- four- or five-blade head, I always set the phase shift in the same way:
One of the rotor blades is aligned exactly over the tail boom. Then I give “pitch” forward (direction of flight). Now the rotor blade which is above the tail boom should not move. If it does move, then I change the value for the phase shift until the rotor blade no longer moves. This is then the correct phase shift.
With this method I can adjust any multi-blade head.
Yes heri, that’s what I did when I first set up the heli with BeastX a while back, but initially thought that I didn’t need to do it now because I ‘knew’ what the angle was from my BeastX setup. I did it again yesterday to correct it
But, as I said, the phase angle must surely be fixed by the head’s geometry, so why don’t the manufacturers give us a number?