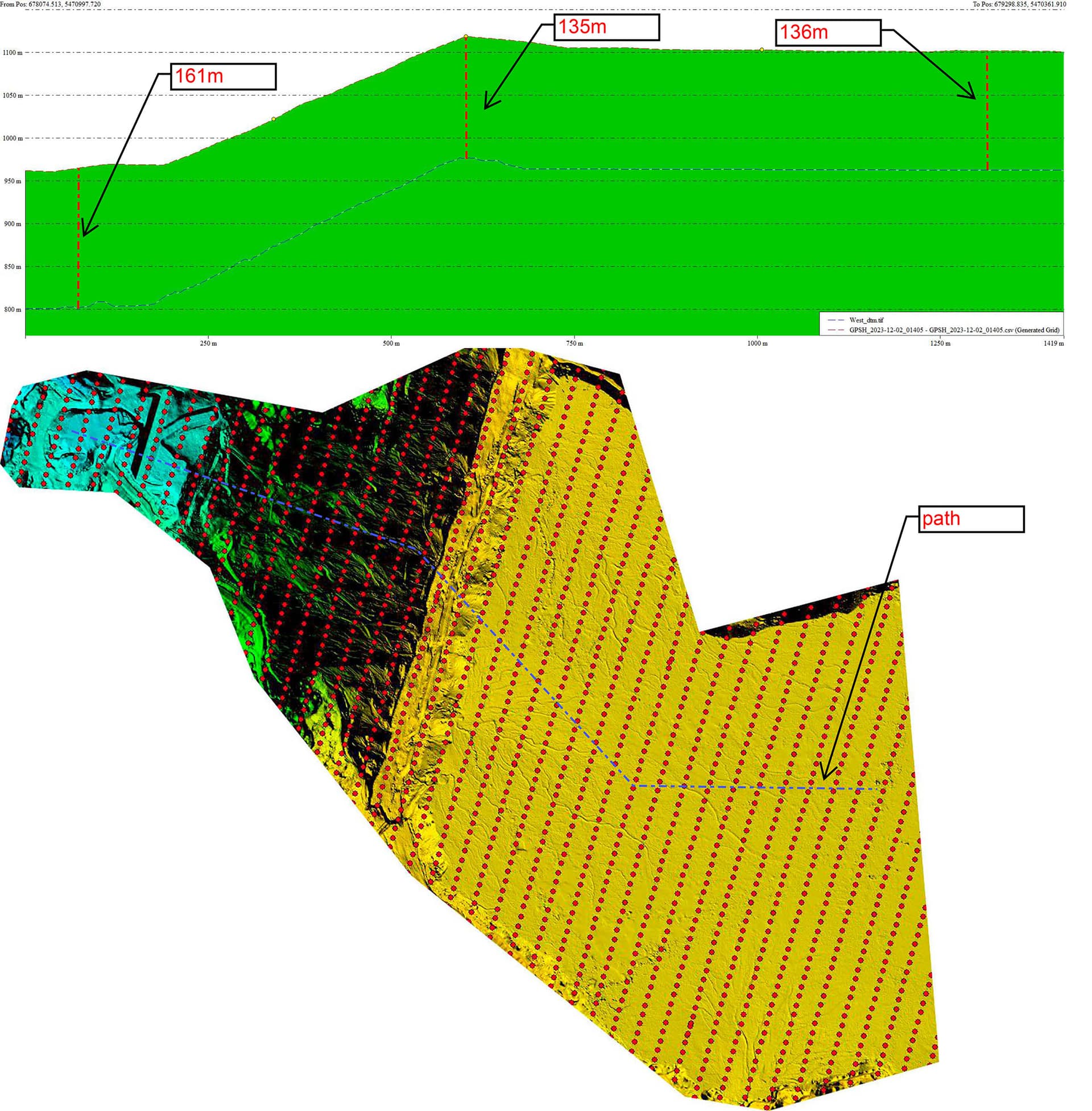
My photogrammetry missions keep diverging from the specified absolute altitude. In planning, I’ve set the elevation to absolute at 160m. It’s accurate at the beginning of the grids, but deflects up to 25m lower by the end. The dtm Mission planner uses is from a previous scan converted to WGS84 geographic and EGM96. This previous elevation model would be 30cm lower at most. The elevation graph in MP shows the correct elevation. The cross sections from the flight’s DTM and the image positions are lower as the grid continues from the beginning to the end (160m AGL to 135m AGL). I’m using two Holybro 9fp helical gps units (moving base for heading) that aren’t rtk. I can’t imagine you would have a consistent error by not running rtk. Here’s where it gets really weird. I noted the elevation when the drone was flying directly overhead multiple times showing from 159 to 161m relative to the home point! When really it was 137m. If the elevation difference was consistent, it would point to maybe the gps was using ellipsoid elevation, but it’s set to EGM96 and that would only account for about 15m. I’m scratching my head lol!
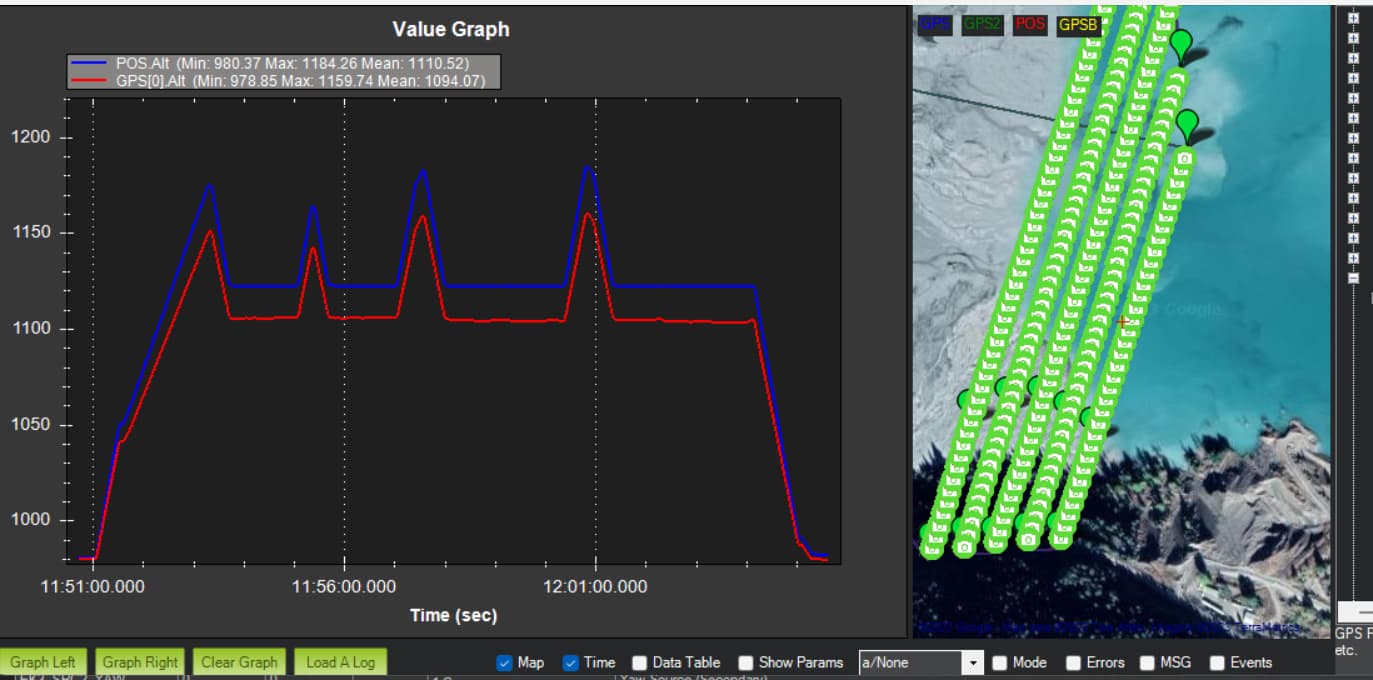
A log of the flight would be helpful. To compare Baro/GPS/EKF altitude values… What is your primary altitude source for EKF? If it is default then it will be baro not GPS…
The ekf source is the barometer. I think the barometer may be a cray-cray. The difference between my gps and baro is the difference in the cross section from Global Mapper. Is it okay the use gps without corrections? The problem with corrections is my base is located a few km from where I’m flying from as it’s just used for rtk gcp marking and ppk flight processing.
This log file: Dropbox - 135 11-30-2023 12-06-56 PM.bin - Simplify your life
If you fly without any RTK data sent to the drone you can use any RTK capable receiver connected to GCS to “pin” GPS coordinates (error wont change). If you have remote RTK base station you can use it as long as it isn’t too far away.
I could give it a try. Usually, I’ve never been very concerned about absolute accuracy for navigation. It’s going to be a messy setup in the end lol. The reason my base is 2km away is it serves multiple LZ areas as well as corrections for sonar sounding. There’s never a known point over the LZ areas being they’re always changing. The base is sending corrections via LORA or UHF radio to my rover pole or boat, but those are Emlid gnss units. Maybe I’ll set my rover pole (which mounts to my truck) to a base, use the known position from when I parked and send corrections from it to my laptop. That would work : )

You don’t need to know exact base station position to benefit from increased position precision.
You can also use another computer connected to base station to relay corrections over the internet
No internet or cell data coverage in these type of locations. But sending correction from my rover via Bluetooth will work as my gcs laptop is always close to the rover pole. As for exact know position, I can actually grab it in the data collector. It’s actually faster that waiting for an averaged point in base mode. Also, an accurate know point will give you a more stable solution. Errors in a know point can cause the solution to enter float status. I’ll give it a try tomorrow. Do I just change the ek3 to use gps or should I also set the affinity lane thing? I can’t remember the exact parameters😂
Yes, to use GPS for alt you will have to switch primary altitude source to GPS in EKF.
IMHO running lane affinity sounds like a good idea though I have no quality comparative experience here.