My #2 450 heli, FBL, equipped with pixhawk, and telemetry trough the radio.
After initial tuning, checked the Alt-Hold behavior.
The first go, made the heli go down, as i was hovering at about 1/2 a meter, it ended harmlessly on the ground. The second switch made the heli gain altitude, and on the third it was almost level, but started slowly climbing, so, I had to return back to stabilized…
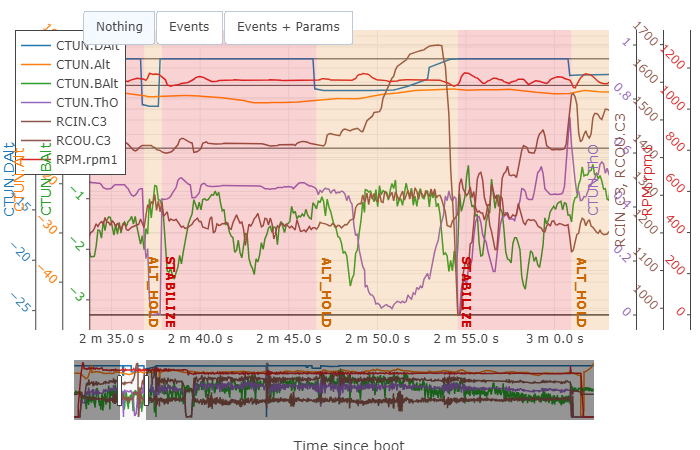
following is the chart of the data:
checked col_mid to be on zero collective.
Tried it in few rotor RPM’s, seems that the AP can not cope with different RPM’s as Alt-Hold behavior was acceptable only in RPM that hover was done at mid throttle…
I have RPM reading in the data although the scaling is not correct.
Could not check the actual RPM… any idea on how to check the actual RPM ?
link to the recorded data : https://drive.google.com/file/d/1P9J7nepVNKOKcCkSn6OyT3oEnjy3Bp5P/view?usp=sharing