RizHass
April 11, 2024, 3:16am
1
I am shopping for a small quadcopter, and the BetaFPV Pavo Pico seems to match the Ardupilot requirements, but I don’t see a firmware listed on the download page for F4 2-3S 20A AIO FC V1.
This particular flight controller have following spec:
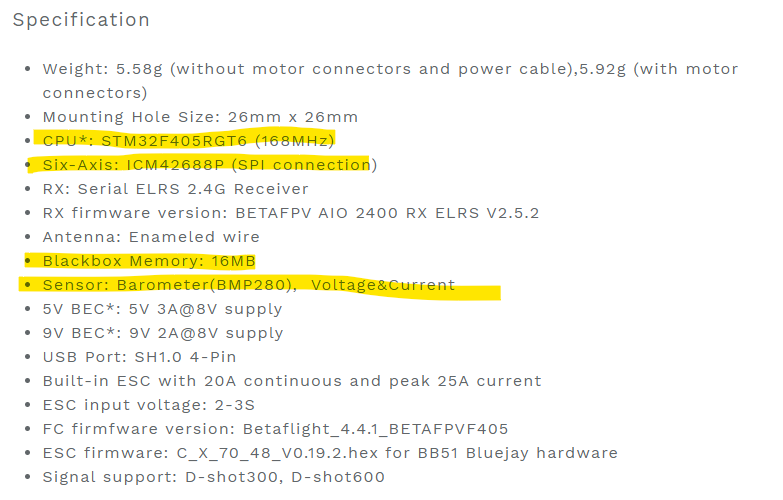
CPU*: STM32F405RGT6 (168MHz)
Six-Axis: ICM42688P (SPI connection)
RX: Serial ELRS 2.4G Receiver
RX firmware version: BETAFPV AIO 2400 RX ELRS V2.5.2
Antenna: Enameled wire
Blackbox Memory: 16MB
Sensor: Barometer(BMP280)
Can someone point me the firmware fitting this FC?
FC: F4 2-3S 20A AIO FC V1 – BETAFPV Hobby Pavo Pico Brushless Whoop Quadcopter – BETAFPV Hobby
andyp1per
April 11, 2024, 11:02am
2
It doesn’t look like we have a port for that but it looks very similar to the 1S AIO board I did. Its worth possibly trying that to see if it works. BETAFPV-F405
RizHass
April 11, 2024, 12:32pm
3
Thanks Andy. When you used BetaFPV-F405, did you disabled logging? Board blackbox memory is only 16MB (no-SD slot). Did you disable anything else?
andyp1per
April 11, 2024, 12:42pm
4
It has a flash chip I think
RizHass
April 13, 2024, 1:53pm
5
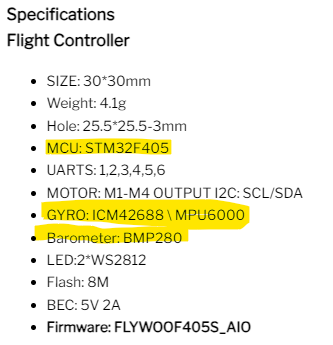
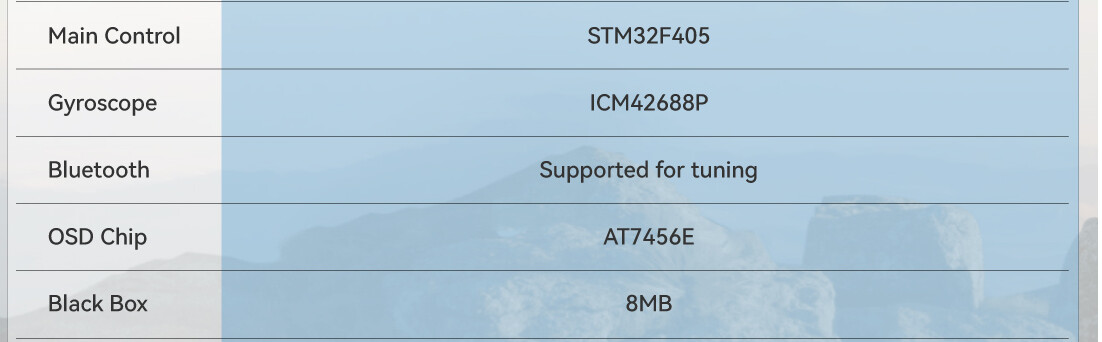
So there are three choices that could fit Ardupilot:
Pavo Pico, starting at $105 : Pavo Pico Brushless Whoop Quadcopter – BETAFPV Hobby
FlyLens, starting at $140: https://flywoo.net/products/flylens-85-2s-drone-kit-brushless-whoop?sku=18060926749298781122922494
SpeedyBee Bee35, starting at $230: SpeedyBee Bee35 3.5 inch Drone HD O3 Air Unit FPV - Speedy Bee
Does anyone in the Ardu_community own these and can comment/recommend which one would be a good choice?
I fly in large fields and losing a drone is no fun, that’s why I like Ardupilot RTL. Much more reliable than iNAV/Beta flight.
andyp1per
April 13, 2024, 3:32pm
6
You need to find out what flight controllers they use - not sure any are supported as yet
1 Like
andyp1per
April 13, 2024, 6:21pm
8
No I mean the name of the FC
andyp1per
April 15, 2024, 9:24am
10
I think we might support 2&3
1 Like
_sobi
September 21, 2024, 1:56pm
11
Did anyone succeed with running of Ardupilot/Copter 4.5 on F4 2-3S 20A AIO FC V1 board https://betafpv.com/products/f4-2-3s-20a-aio-fc-v1 that is inside of BetaFPV Pavo Pico and Pavo20 Pro? I’ve tried it to make run on Pavo20 Pro with some kind of success with BETAFPV-F405 ardupilot target board, but detecting of Baro doesn’t work. See my branch Commits · mariansoban/ardupilot · GitHub STABILIZE .BETAFPV F4 1S 12A AIO V3 — Copter documentation and the newer one, but I have no idea what yet, documentation to new board says, that it contains Barometer(BMP280/DSP310), which could be rather DPS310 https://www.infineon.com/dgdl/Infineon-DPS310-DataSheet-v01_02-EN.pdf?fileId=5546d462576f34750157750826c42242 . I don’t even know if baro is connected with SPI or I2C interface…
PS: I also had to fix motors order, but this is the configuration thing.
andyp1per
September 21, 2024, 3:43pm
12
There are a lot of different variants of these BetaFPV boards with similar names but very different setups. I suspect you need to create a new board definition.
_sobi
September 21, 2024, 9:09pm
13
Just for info - I’ve made that baro-sensor work with this update of configuration in hwdef.dat
SPIDEV dps310 SPI3 DEVID2 BARO1_CS MODE3 5*MHZ 5*MHZ
BARO DPS310 SPI:dps310
...
define AP_BARO_BACKEND_DEFAULT_ENABLED 0
define AP_BARO_BMP280_ENABLED 0
define AP_BARO_DPS280_ENABLED 1
It uses SPI interface with same pins of STM32 like BMP280 in previous board version.
STABILIZE> devid
INS_GYR_ID: bus_type:SPI(2) bus:1 address:1(0x1) devtype:52(0x34) INS_ICM42688 (3408138)
INS_ACC_ID: bus_type:SPI(2) bus:1 address:1(0x1) devtype:52(0x34) INS_ICM42688 (3408138)
BARO1_DEVID: bus_type:SPI(2) bus:3 address:2(0x2) devtype:6(0x6) BARO_DPS310 (393754)
RizHass
December 2, 2024, 3:34pm
14
@_sobi , Are you planning to merge these changes (PR)? That would be nice
_sobi
December 3, 2024, 7:07am
15
Hi, actually I’m not, but feel free to create PR if you would like.
Hi, I’m trying to run Ardupilot’s Copter 4.5.6 on Beta Pavo20 Pro quad (see Pavo Pico Brushless Whoop Quadcopter - #13 by _sobi ), but I’m having issue with tuning of Altidude Hold mode.
Estimated altitude in CTUN grapsh is way away from real altitude at the beginning, baro altitude is close to real altitude of vehicle a bit off when in ground effect. Vibrations graph seems to be OK.
One of the consequences is that I’m not able to take-off in Altitude Hold mode as the vehicle “thinks” that it’s…
for details. Gyros works fine. I’m not sure if it’s the issue of my board or if it’s common issue to this board.
RizHass
December 3, 2024, 3:27pm
16
@_sobi thanks for sharing your struggle with the F4-board. I am not a developer perhaps @andyp1per can PR if the Ardupilot board feels worth merging your changes.
andyp1per
December 3, 2024, 5:49pm
17
I’m going to try and get one