Dear All,
I started my adventure with telemetry some time ago when I bought Jumper T16 transmitter. I have X8R receiver which works great with standard Smart Port telemetry. I have Arduino connected to X8R receiver to emulate sensors.
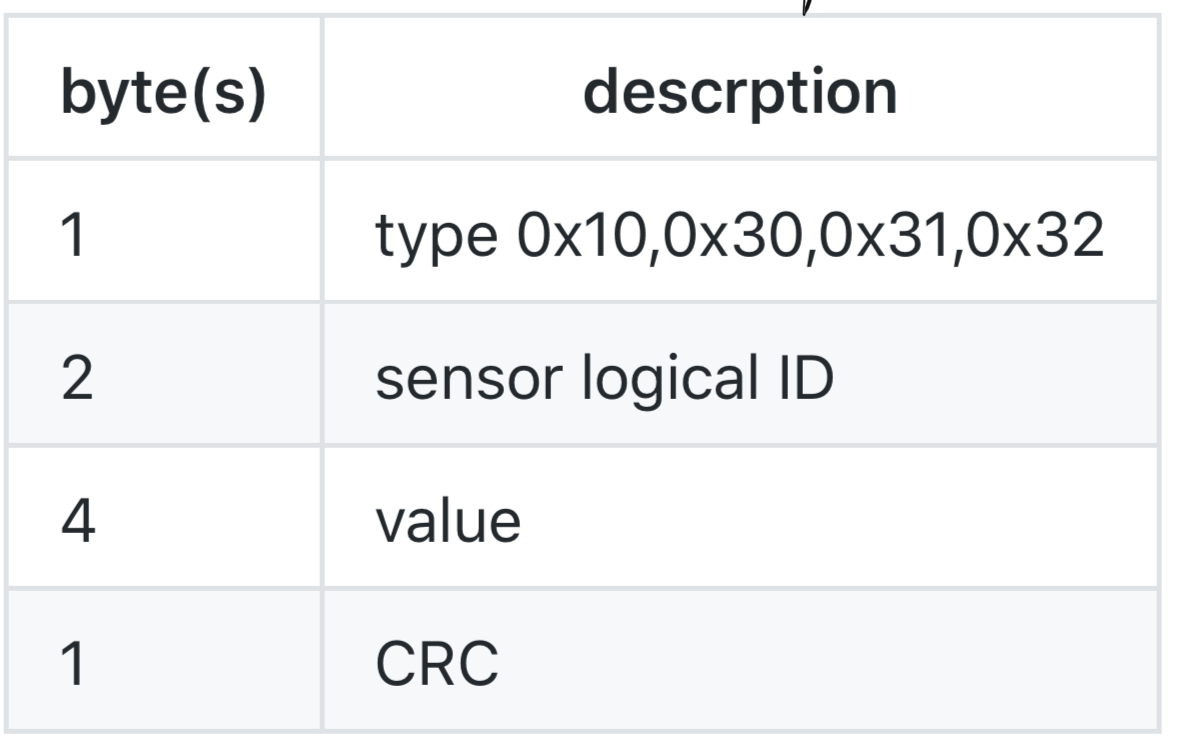
By studying Smart port documentation and sniffing packets I have understood how Smart Port packet should look like. Sensor is called by receiver by with two bytes- 0x7E and called sensor id byte. Sensor answers with packet containing Type od answer (0x10), logical id, Value, and checksum CRC as per below picture.
I would like to build my own sensor pack customised for my rc plane based on Arduino. However I would like to use different telemetry protocol called Passthrough telemetry to make use of Alex’s Apostoli YAPU awesome telemetry script. The only description of this protocol I found here:
http://ardupilot.org/copter/docs/common-frsky-passthrough.html
And in spreadsheet linked to above webpage:
https://cdn.rawgit.com/ArduPilot/ardupilot_wiki/33cd0c2c/images/FrSky_Passthrough_protocol.xlsx
My problem is that based on description avaliable in internet I am unable to understand packet structure for passthrough telemetry. How this packet should look like? How this packet should look like in case of multiple sesor Values for one ID (eg for airspeed which consists of vertical velocity and horizontal velocity information).
Any help is truly appreciated…
Thank you very much!
Karol