concerning your FrSky question: What I actually think could be a (very!?) worthwhile thing to do is a MAVLink message which can carry an array of passthrough datagrams. IMHO this would have two advantages:
some of the data required for converting to passthrough are not so easily obtained from the MAVLink messages, like e.g. battery parameter values and other. So one could e.g. just send the missing data, or in fact just send them all given it’s not very spaceous.
(which - what a coincidence - would be then essentially your idea, just wrapped into MAVLink)(and motivated form a different angle LOL)
it could be a “better” kind of high latency message. I must admit I am not excited about the new HIGH_LATENCY2 at all, as it misses quite some data one would often want to have, so it is useful onyl for really specific cases. However, given that the passthrough telemetry is time proven, such a MAVLink message would indeed deliver a more widely useful high latency message, and more over, it would be very flexible in its content!
I think it could really address a number of issues.
EDIT: one in fact could just use the existing TUNNEL message !!! I guess I should do a sample implementation…
haha @olliw42 I knew you’d give it a try, would solve all your issues in an elegant and transparent way
MAVLINK TUNNEL is the way to go, really good idea
Got almost everything working. Taranis X9D Plus, EdgeTX, ELRS and Yaapu Telemetry. The only problem I have is with altitude. The correct altitude relative to home is displayed on the telemetry page. ASL altitude is also correct. However, if I try to display the relative altitude on another telemetry page using the variable Alt, I always get the same value as GAlt. I can’t figure out why I can’t properly display Alt. Thanks.
I can make the script running on my Radiomaster TX16 with Nano RX and CUBE ORANGE wit Plane 4.3.0 beta1
I am working on a new build with a MATEK H743 SLIM V3, I loaded latest Beta and connect to SERIAL1 (Mapped to USART and it is working as I can read MavLink) but I cannot get Telemetry reading
I mad a custom build with these features, but still no data
{“selected_features”: [“EKF3”, “UBLOX”, “BMP085”, “BMP280”, “BMP388”, “DPS280”, “FBM320”, “ICM20789”, “KELLERLD”, “LPS2XH”, “MS56XX”, “SPL06”, “AIRSPEED”, “CRSF”, “QUAD”], “git_hash_short”: “ad6bf648e9”}
Hi Patrick,
so how did you configure it?
RC_PROTOCOL=23 and CRSF on the TBS RX side, do you receive regular CRSF telemetry as discoverable sensors on your radio?
Ok, that won’t work, disable and disconnect sbus, use crsf only, set protocol 23 on the serial port connected to the crsf tx/rx lines. Custom telemetry works only over CRSF as RC protocol
One last advice, CRSF pretty much requires a serial port with DMA or you will eventually run into issues.
BTW the setup you were using (SBUS + CRSF on different ports) is for controlling external devices via the CRSF protocol such as runcam cameras
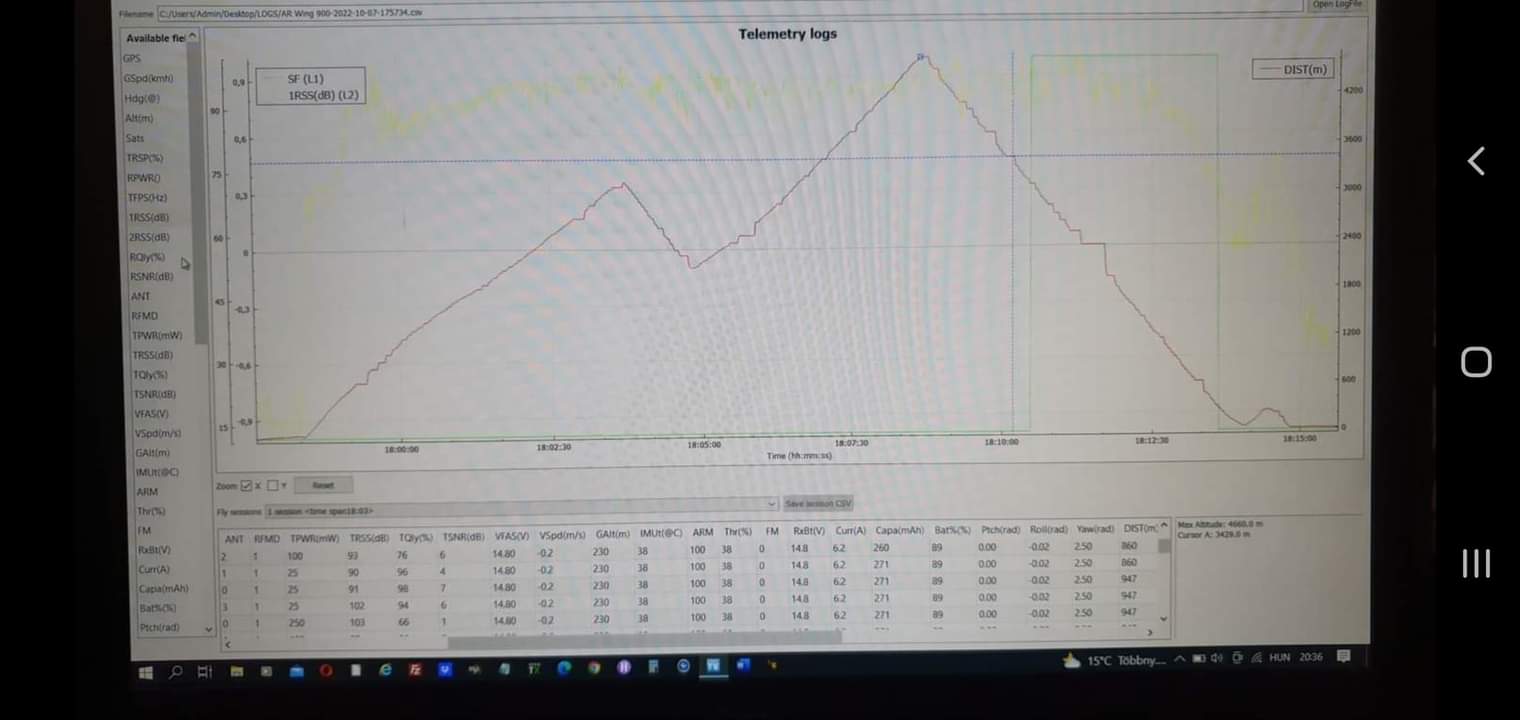
Anybody had experienced that yaapu telemetry freezed while the normal telemetry coming from crsf rx and FC to the radio(TX16S Mark II) was continous?. I have lost my dji video signal coming back to home from 4.6km at around 3km and shortly after thatb yaapu script also stopped refreshing datas🤔 . Checking the edgetx telemetry log i not found any break in the telmetry values. ON the graph i marked with the blue crossing line where the video was gone and after that point the yaapu telmetry also freezed. I could switch to RTH showed by green line SF switch position and the plane was in RTH when video come back so RC control also worked during the video disconnection
and yaapu freeze. The yaapu telemetry only came back after 30 -40seconds when the plane was at 1.5km and than i switched off RTH (the video also reconnected with the dji goggles). Unfortunately FC did not logged due to a bad sd card, so have only radio logs
FC: matek F405 wing with 4.4 custom build FW for canvas mode msp osd
So based on the radio log i cannot see any issue in the telemetry stream🤔
I only changed before this flight crsf rx UART 1 to 236K instead of 115k in MP…and the crsf module baud to 400k in the HW menu of TX16S. As i ve reqd uart 1 can work till 400k.
What can i check in the radio log which can show if it there was or not break in the telemetry stream around 3km ditance…is it possible yaapu script can freeze for short time in spite of the radio get all passthrough telemetry continosly.
Hi, only thing I can think of is that CRSF dynamically throttled the telemetry rate to a very low one, the lowest rate is just too slow for passthrough telemetry so the effect would be a freeze of the screen.
Standard CRSF telemetry would keep flowing with updates like once per second.