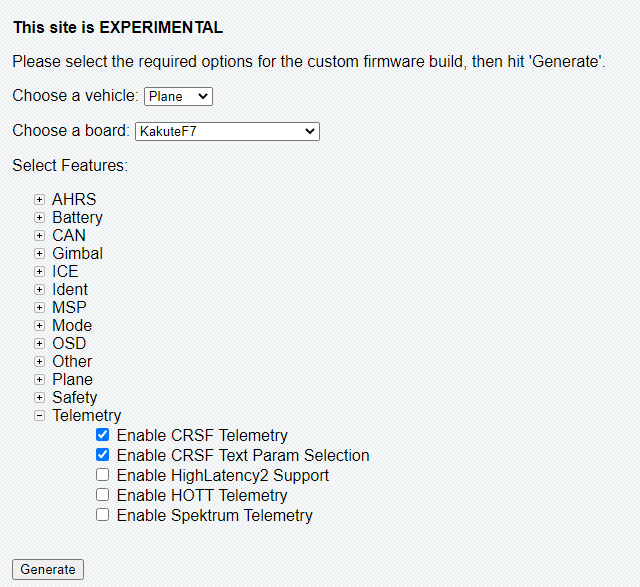
Hi, you need to use the custom build server and manually enable CRSF and all other features that you need, note that the build can fail if you enable too much and exceed the KakuteF7 flash size
I am using the custom build with crsf, crsf text turned on.
Btw I also have msp osd turned on, which does work with my dji hd system. I also tried turning on as many sensors as I could. This is on a 5” quad. “Copter” build.
I did just rebuild the custom kakute F7 code maybe you could have a quick look at the log?
Yes tried the latest script. Same problem with 1.9.3 1.9.4, 1.9.5 etc. I don’t think it’s the script, as I said all works on my other FC’s. Btw I did have a kakute F7 1.5 and a kakute F7 HD. They both have the same problems. I’m switching the kakute F7 hd to expresslrs this weekend.
I do get crsf Rx sensors but I only get 3 ardupilot sensors. And those sensors don’t update.
Rc_options = 288. Note in ardupilot 4.2 dev you get a menu when selecting this option. I just selected crsf passthrough.
I think you have a very special Crossfire Micro Nano TX and RX because I can only get 50 till 100m with Mavlink telemetry on my GCS only, until the connection is broken again.
I’m not talking about the RC link that is working fine for a very long range but the MavLink telemetry is just crap and useless.
I would never buy a Crossfire system again!
DMA enabled uart on Matek 743 slim? Maybe a very dumb question but… How do i know which one it is? Link below says UART6 NODMA. I know very stupid. But if I swap to another available UART I reduced the risk of dropped frames/failsafe?
Andy P’s video has been a great help and the Yappu script is a nice addition. Just don’t like the errors popping up.
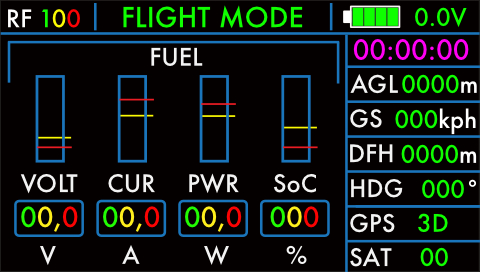
Hi! I made a industrial-grade RC with CRSF TX/RX link. As I’m able to decode the CRSF messages, I’m not able to decode the Passthrough messages as I have no idea of the protocol. Can you post a link or a Passthrough spec so I can add this in the RC? Here a screenshot of my telemetry screen. What I’m missing is Magnetic Heading, Relative Altitude, GPS Type.
Hmmm… Why I don’t find any reference to the CRSF IDs 0x80, 0x7F, 0xF0, 0xF1 and 0xF2?
Ardupilot is sending out this frames, so there must be defined somewhere, not?
Thanks to all! Will glide into it.
Just for clarity: How will Magnetic Heading, Relative Altitude and GPS Type be sent? There are no native CRSF messages, right?