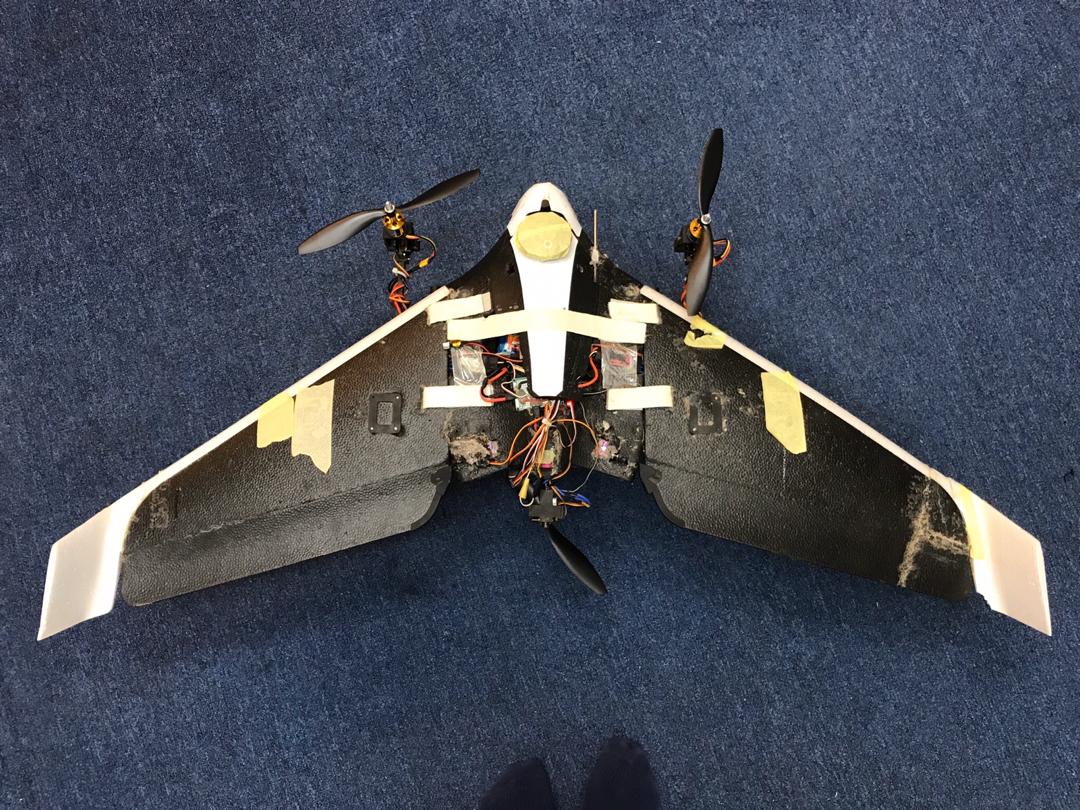
Hello guys, we’ve customized a parrot disco to become a tilt-rotor Y3 quadplane. The specs are as below:
3 x A2212/13T 1000kV brushless motor.
3 x EMAX ESO8MDII tilt servos
2 x MG90S Digital elevon servos
3S 3000mAh 60C LiPo battery
Total weight: 1600g
Many flight tests were done and it is consistently observed that the aircraft couldnt stay on air for even a minute before the battery starts depleting and the aircraft decends by itself. On average across the many tests, the aircraft takes off at ~70% throttle. We tried removing 130g of weight (landing sticks) as we thought it could be the weight that was holding it down but it still couldnt stay more than a minute.
Do you guys think the battery specs is not suitable for the config or could the battery that we’re using be faulty? Or could it be the weight or something else?
However, a few adjustment to the aircraft have been made today which are
repositioning of the 3 motors (previously a little portion of the propellers were overlapping the body of the parrot disco, hence the airflow was partially blocked).
replacing the whole body and wings of the parrot disco (which have experienced too many crashes and repairs) with a fresh unharmed set.
total weight amounts to 1400g.
So far the indoor hover test has been showing improvements even when using the same battery as before. Tomorrow we’ll be doing the outdoor flight test to test hovering in VTOL and transitioning to forward flight mode.
Welcome to the APM VTOL forum! It looks like an interesting project you have so please post some photos.
Your battery seems quite adequate for the task.
3S 3000mAh 60C LiPo battery
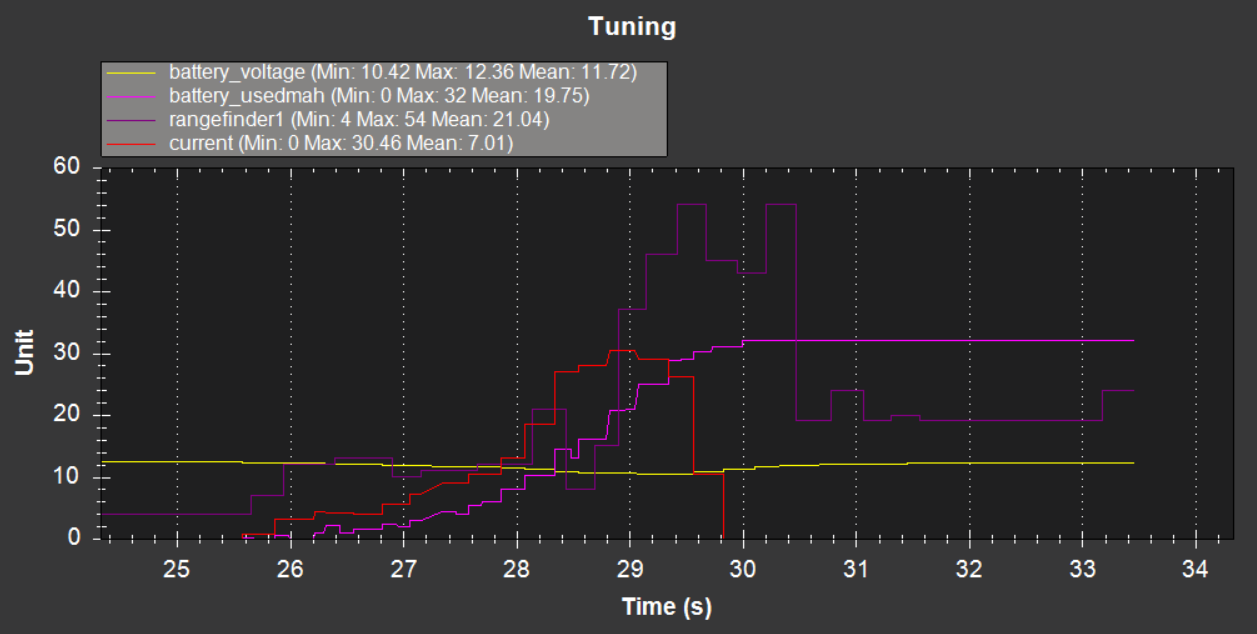
Your max current draw was 30 amps, although it was only for a few seconds. So 3AH at 30 amps is a 10C discharge rate, which is well under your 60C capability. Hence, there is almost no dip in the voltage during hover.
Perhaps something is getting hot? I second what Manav asked about posting a log for more help.
It seems the battery isnt the problem. The previous problem has been solved after replacing the parrot disco structure with a new one and a little repositioning of the motors for full clearance.
With the new structure we have very stable takeoffs and manage to climb much higher altitude than before. The problem now is the forward flight transition. The parrot loses control 2 seconds after transitioning from QSTAB to FBWB. QLAND managed to save our parrot twice thanks to the higher altitude.
Currently the config is vectored thrust with all 3 motors tilting. Is it possible to activate only the rear motor for forward flight while tilting all 3 motors? The aircraft lost control with its nose up when transition is initiated. We might also try binary transition after this. Thanks in advance.
Our Q_TILT_MASK is current set to 11 = 00001011 for tilting all 3 motors. My new discovery from https://www.youtube.com/watch?v=WMh8BiOLrns is that we can use the auto mission command DO_VTOL_TRANSITION = 31 for single motor forward thrust (32 for twin front and 33 for all thrust). However, i do not know how to set the order of commands correctly (i.e setting the do_vtol_transition and then waypoint etc.) Any help on that would be greatly appreciated.
Thank you in advance
p/s: I think the title of this thread should change to “Parrot Disco Quadplane (Y3-config)” or anything you guys think that fit the topic. Thanks!
Oh Im sorry, my bad on the Q_TILT_MASK in the param file. The reported flights were from using Q_TILT_MASK = 11. Changing it to 8 was an attempt to only activate the rear motor for testing on the ground. Sorry for a newbie question but, what are the changes that should be observed if the Q_TILT_MASK is changed?
Initially, the entire param was taken from VTOL>Parameters>SkywalkerX8_Y3x3.param in https://www.dropbox.com/sh/ircqhf6phsgagk3/AAA_Cw3VwoHm2o_viCWHZJj9a?dl=0 which is used together with what I believe to be a customized arduplane firmware for pixhawk 2 VTOL>Firmware in the same dropbox folder. I think that explains why SERVO7_FUNCTION is set to 45 instead of 41.
Exactly the effect you posted below. The plane will hover properly but go nuts when transitioning to forward flight.
I would initially recommend using just the front two motors for forward flight and set Q_TILT_MASK to 3 (not 5). After success with this setup, and perhaps a reply from Rolf, you can experiment to add in the rear motor.
Hi Greg, hello Jack,
also from me welcome to the VTOL Flyers.
As Greg already wrote, I would first use the “normal” configuration (Q_TILT_MASK=3) in order to test wether hovering, transitions and flight are working properly.
In my opinion the wing flight should work with the rear engine (Q_TILT_MASK = 8) alone. It could be that the front motors will turn all the way forward, but the motors will be switched off in any case.
The youtube video does not help, because a customized firmware is used.
Log files of the flights would be helpful to narrow down problems.
Thank you so much Rolf and @GregCovey for your help. Changing Q_TILT_MASK to 3 and using FBWA mode for the flight worked for us. The parrot transitioned (although not super smooth) and flew as a plane beautifully. It also landed successfully using a combination of plane and copter which turned out to be a little dramatic LOL. However, we still havent succeed in doing auto missions with it. Will do a little study on that.