I am setting up a new build using ArduCopter v4.0.3 on a PixRacer R15. I am using Mission Planner 1.3.74 as the GCS.
If I set the frame type as a quadcopter under setup > Mandatory Hardware > Frame Type, the parameter “FRAME_CLASS” changes from a “0” (meaning “undefined” - this is the default) to a “1” (meaning “quadcopter”). If I disconnect the quadcopter from MP, cycle the power, and reconnect it; the “FRAME_CLASS” is back to the default value of “0”. I noticed this after attempting to run through the full calibration multiple times and then getting errors stating that my compass was not calibrated even though I had just calibrated it.
I do have an SD card installed. I found a forum that mentioned it could be a bad FRAM chip on the PixRacer. Is there a way to confirm this? It’s brand new, so I would hate to scrap it if that was not the underlying issue.
I have set up several successful builds similar to this one, so I am not sure what is wrong.
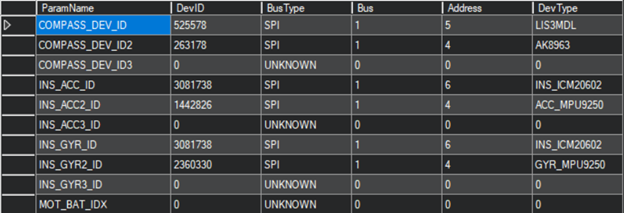
Thank you for clarifying. Here is a screenshot of the HWID page. I removed the Pixracer from the build, so the rest of the components are listed as “unknown”.
Sorry for the late reply. I ended up switching to a new Pixracer and the problem was resolved. I am guessing it had a bad FRAM chip, so it wasn’t saving any data.
{kind=link}