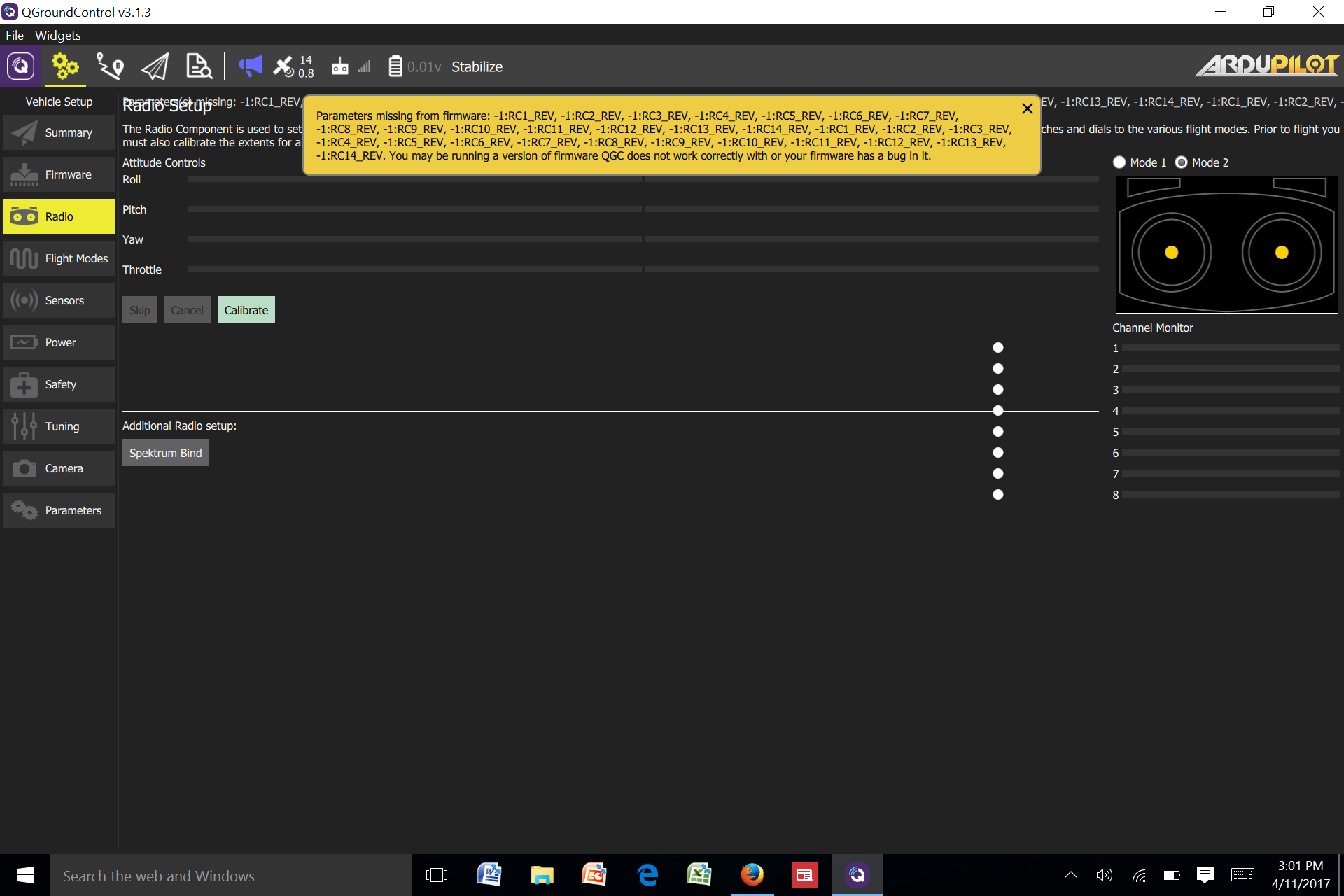
I have had this error since 3.5 rc1. Just loaded rc4.
Is my pitch problem related to this? https://github.com/ArduPilot/ardupilot/issues/935
When I pull back on my pitch stick, my bird pitches forward. Stick forward, pitch back.
megabotz
I have had this error since 3.5 rc1. Just loaded rc4.
Is my pitch problem related to this? https://github.com/ArduPilot/ardupilot/issues/935
When I pull back on my pitch stick, my bird pitches forward. Stick forward, pitch back.
megabotz
QGC has not been updated to accommodate Copter 3.5. Mission Planner has been and works.
Hi Kyle,
First, you should reverse the pitch channel on your transmitter if possible, it isn’t recommended to change it in ArduPilot.
Second, to use Copter 3.5 with QGC you need the daily build, the stable version doesn’t support it.
Thanks, channel reversed but I haven’t flown yet.
megabotz
You can still use QGC but the master version that has been updated to accomodate the latest changes of ArduPilot. Check here https://donlakeflyer.gitbooks.io/qgroundcontrol-user-guide/en/download_and_install.html under Daily builds.
Why is this not recommended? I ask this because I’m using reversed pitch in Copter (still 3.4) and till now I did not observe any problems or side effects with this?
Thanks,
Stefan
Sure it has. Use a daily build. Install links at the bottom of this page: Redirecting to latest version of document (master)
Oops, just saw Luis already answered.