We are interested in paying a developer to create a section of code for us. This code, when complete, can be open source if the rest of the dev team is on-board. We are anticipating a number of hours of development time, and will compensate accordingly. Please reply here or PM me for further details. Our timeline for completion is in the next 2 weeks.
Our goal is to use a servo controlled gimbal to “swing” a camera in order to reduce motion blur during NADIR photogrammetry. This involves pitching the camera at an angular speed so the ground blur is effectively zero. We are unaware of any way to do this currently except apply a new POI (Point of interest) for every single photo. Considering that we are interested in capture rates up to 3Hz, the POI method does not work well.
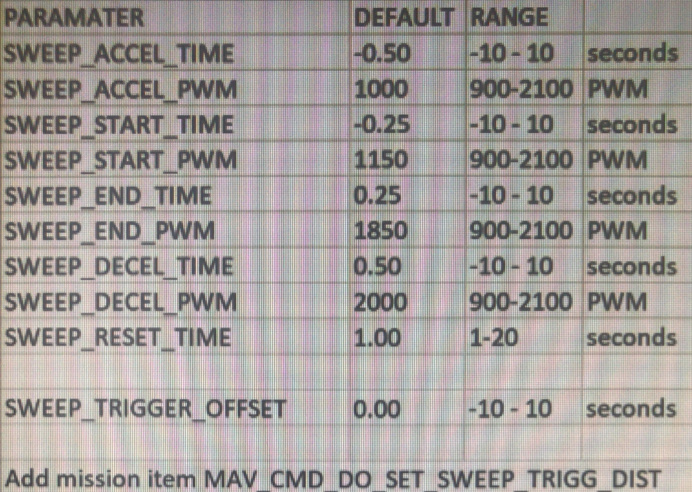
We are open to other solutions, but we have created an initial list of parameters that we think will accomplish our mission.
Interesting concept!
Shouldn’t you move the sensor parallel to the ground? I guess you can calculate the speed as a function of the vehicle speed, the size of the image plane and the subject distance.
Since you will have to move the camera forth and back, I find it hard to believe that that will be possible without generating major vibrations which will offset all gains.
I would be interested to hear about the progress of this concept.
The vibrations added here would be somewhere in the range near 1Hz magnitude - the vibrations that cause jello are on the 1kHz magnnitude. They are totally different, and I don’t think there would be any issues. Cameras now are currently fixed on fixed-wings, and a single-axis gimbal in motion won’t cause any issues that I know of.
Down the road we can definitely calculate the speed of the sweep using the real-time speed and altitude of the vehicle. For now, we are good doing the PWM and parameter math manually to get good sync with the ground.
As a reference, I want to collect 0.0005m (0.5mm) per pixel imagery of the ground at roughly 20m/s cruise speed. For a normal camera, that would require a shutter speed of around 1/40,000 of a second. That’s about 10x beyond what normal cameras can do right now, so I need another solution. Thermal cameras with low integration times (10hz) could also benefit from this blur reduction too.
What??? What is the thing you want to take a picture of?
At what height are you flying, could you use a very powerful flash? I think with a flash you could reach such times.
Interesting project, hope you make a similar great report as for the planes! I will send you some funding when I start to build a mapper plane!
We’re basically taking pictures of the ground. A flash isn’t a bad idea, but the flash sync speeds for most cameras are around 1/300 s, so that wouldn’t work without a global shutter or maybe a really fast leaf shutter camera. Either way, it’s going to be easier for us to pursue this “sweep” route.
You need to use the flash as the only light source (might not be possible I guess) so that only during the periode the flash is firing the sensor records data. The sensor will be aktiv for 1/100 of a second but light will only be recorded 1/100.000 of a second during the time the flash provides enough light.
Radom example:
http://www.vela.io/vela-one-high-speed-flash/
I doubt we are going to easily find a powerful enough flash to remove all ghosting at 1/160s in direct sunlight without it robbing a significant amount of the power needed for propulsion. If you think this can work another way, please PM me for further discussion.
Hi Nate. I get exactly what you’re trying to do here - effectively a panning method commonly used to photograph fast moving objects. I have given the technique some thought myself. I think rather than using a servo directly, the gimbal needs to be sprung so it can oscilate back and forth at a natural frequency close to the required frame rate. The servo (or better yet, a torque motor) can be used to tune the actual frequency and the camera triggered when it is vertical and moving at the correct rotational velocity.
Where are you based? Would be interested in helping out with with developing the technology if it fits.