I live in Maryland but am sure this could be done online. I have attached a sample drawing of what I’m trying to accomplish with this and need to be done soon.
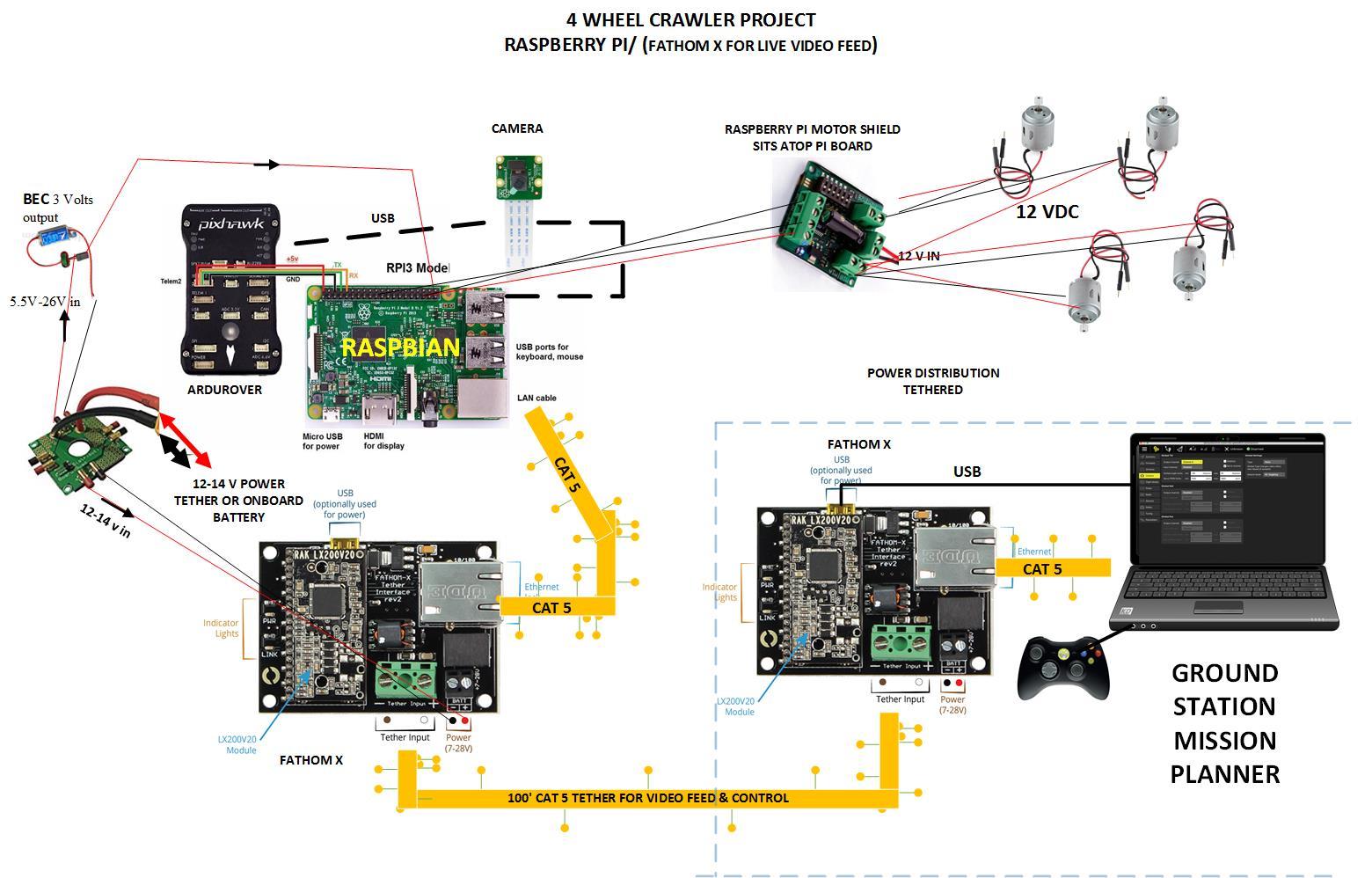
As you can see, I want to control my crawler tethered via a Logitech game controller via tether.
System components -
Raspberry PI 3
Fathom X Electronics package (for live video feed, no problem there)
Pixhawk
Motor controller (not sure I even need this)
I need someone to figure out i.e. PI code, Pixhawk set up etc how I can control the motors and drive the crawler using what I have in the diagram.
Hi,
Control from the computer to the pixhawk should be pretty easily done. The question is why do you use the controller on the raspberry pi instead of directly connecting the motors to the pixhawk through escs or a sabertooth board. Doing that, it would be way easier (no code to rewrite) and you could use all the coolness of rover code