I have a overpowered Mini Talon Quadplane running 3.8.4fw. My problem is that even with the MOT_HOVER_LEARN set to 2 for learn and save, the quadplane still hovers at 20-25% stick in q-stabilize (q_hover, q_loiter etc hovers mid stick).
I have tried to manually change the MOT_THST_HOVER from the default 0.35 value to 0.2 (and other values) but it only influences the q_hover and q_loiter type modes.
With the earlier thr_mid parameter this was sorted out quickly. Any ideas what I am doing wrong?
I looked in the Wiki under Copter. The Automatic Learning of Hover Throttle section looks like it uses both the MOT_THST_HOVER and MOT_HOVER_LEARN parameters.
In Plane, the QuadPlane parameters are Q_M_THST_HOVER and Q_M_HOVER_LEARN. My assumption is that these provide similar or identical functions as in Copter so it may not “learn” unless you are in QSTABILIZE mode or it may simply not be working correctly.
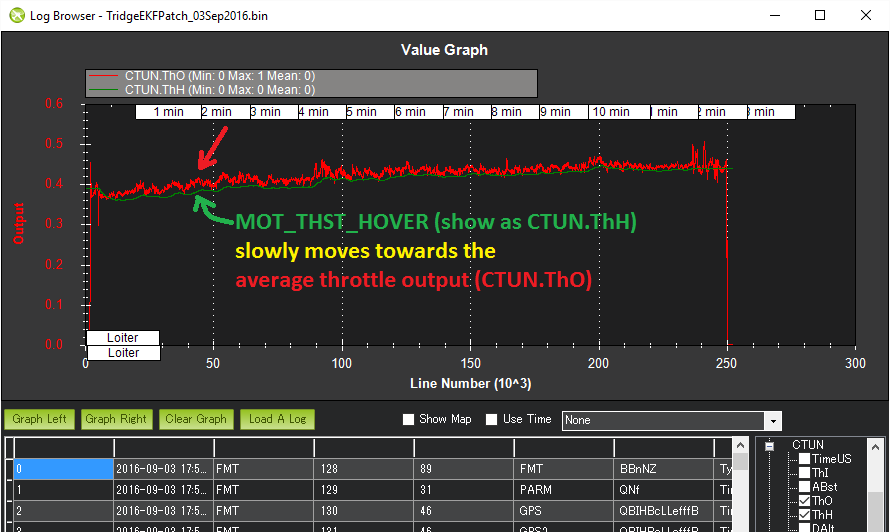
Thanks Greg. I have studied these pages on the wiki but it says that “MOT_THST_HOVER value will slowly move towards the average motor output whenever the vehicle is holding a steady hover in non-manual flight modes (i.e. all modes except Stabilize and Acro)”
From this I read that the learning will not be done in the “manual flight modes” like Q_stabilize. This is also what I experience.
What could work for my q_stabilize problem is to offset the throttle mid position only for Q_stabilize in the Taranis with a three point linear curve (separate “taranis flight mode” for the different “quadplane flight modes”).
This is not elegant and will not give a linear throttle range from idle to max in Q_stabilize, but I might be able to keep the 7x4 props on the craft (not having to go for smaller less efficient props).
Any thoughts?
You’re right, I missed the “non” part in my read. Either way, it doesn’t seem to be “learning”, because you have plenty of QLOITER time on your graph, so I suspect it isn’t functioning properly because you always read 0.35.
I would hate to add complexity on the Taranis but that radio is definitely designed for flight mode changes. Why are you concerned with hover efficiency? Ideally, the hover time in a QP should be minimal.
Yes I will have to go a few rounds with myself to see what solution I should go for (separate mode for q_lotier on Taranis, or smaller props)
True, the hover efficiency is not really important for this type of craft. The thing I can think of is that it gives me a lot of time for testing and setting it up the Q-modes. In any case I have not tested the smaller props and it might not be that bad after all