I have a copter that had its MOT_THST_HOVER set to .50, but it appears that only .15 was required. The MOT_SPIN_MIN was set to .15.
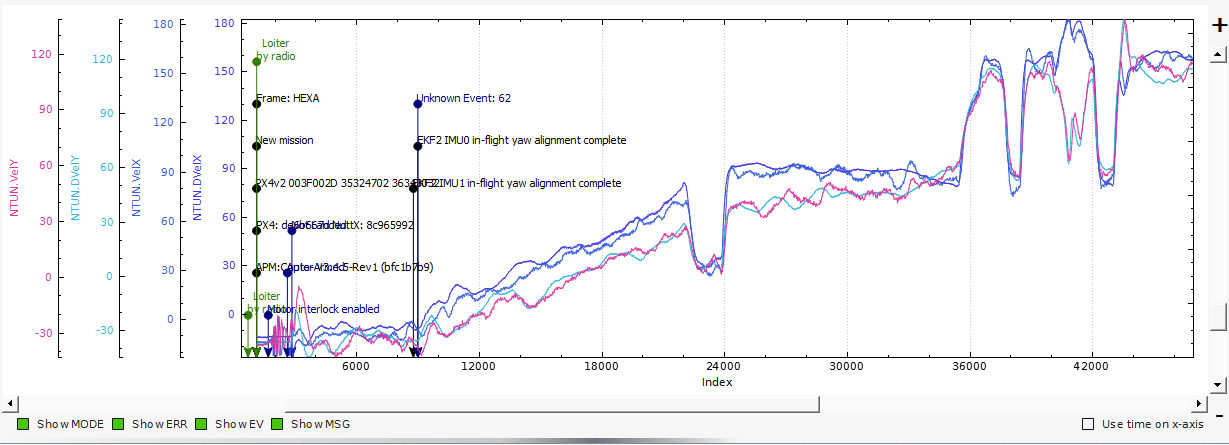
We noticed that the copter would not maintain position in Loiter when hovering. It always started drifting like it was in Altitude hold or stabilize. The GPS was functioning correctly since the trace of its trajectory found during post processing was correct.
I remember a discussion about the takeoff mode not switching to loiter until it was hovering in a stable manner. Is it possible that the flight controller never actually switches to station keeping if the throttle out value never exceeded .15 when the hover value was .50?
We’re going to run a test next week with more reasonable MOT_THST_HOVER AND MOT_SPIN_MIN, but I wanted to see if anybody knew whether this was the expected behavior.