Hello,
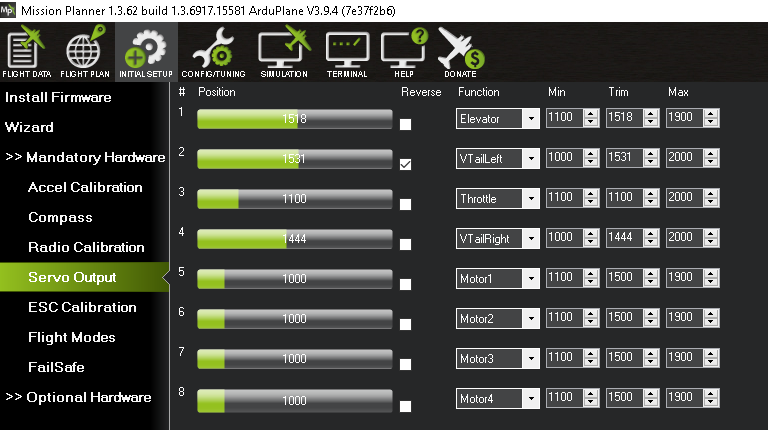
I’m building a VTOL Mini Talon, but output of servo motors (motor 1 to 4) stays at value 1000 in mission planner.
In FBWA or MANUAL mode, servos and rear motor are OK.
But in QSTABILIZE mode, I don’t succed to arm motors… PWM value stays at 1000.
Maybe my rudder arming is not working ? (I have done a radio calibration).
I would like to analyse logs to know if I correctly arm the Pixhawk, but I don’t know where to look.
On the same way, impossible to calibrate ESC motor with Q_ESC_CAL=1.
Any ideas ?
Thanks