Hi guys,
my copter that worked and flied normally about 2 months, now just refuses to do any missions and is out of control.
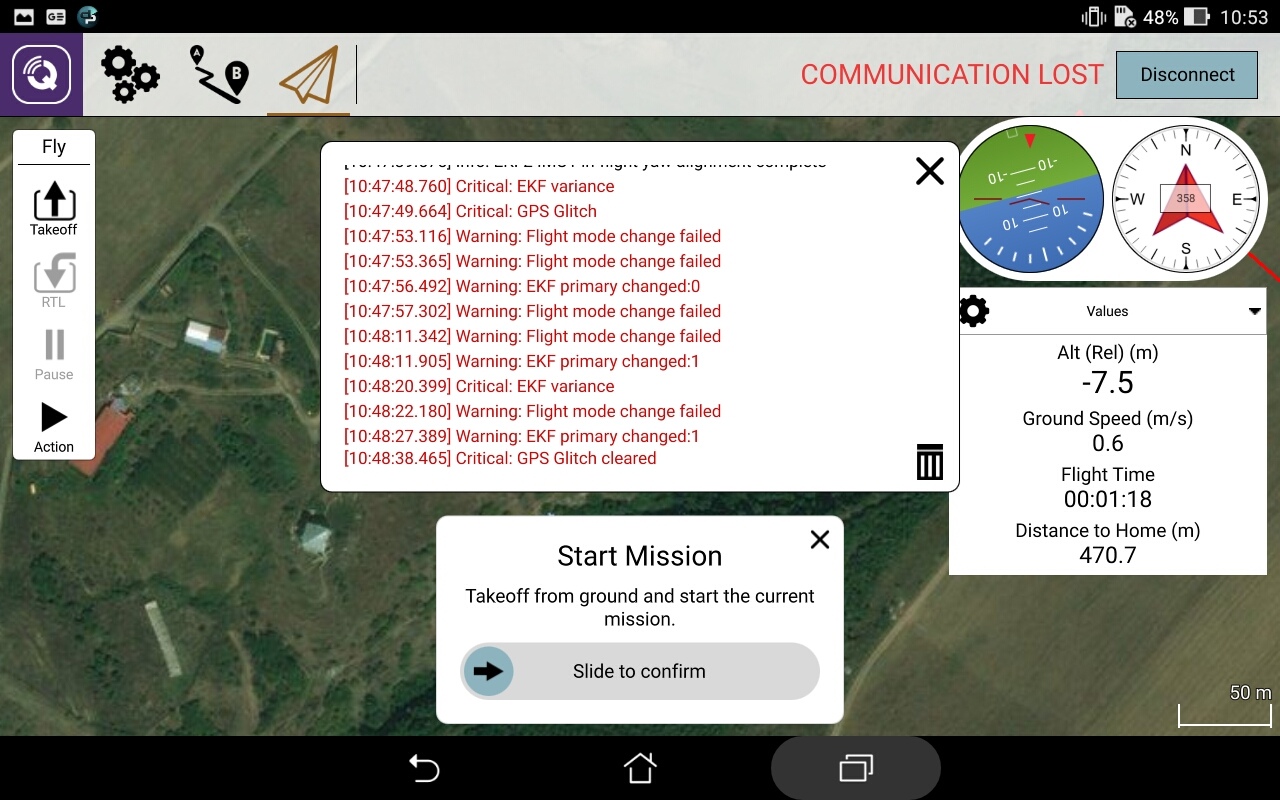
At first everything was OK, I used the “QGroundControl” to setup a mission, and the copter flighted to the selected points very easly. But about two weeks ago when as usually I pressed “start the mission” on the QGroundControl (I use an android tablet), the drone took of but instead of flying to the next point, the flying mode was suddenly switched to “Land”. When I manually changed the flying mode to “Auto”, the copter just continued the mission, and started to fly to the next selected point. The next flights were like that, so I had to change the flying mode manually, to enable the copter do the mission. But yesterday even after when I changed the mode to “Auto”, the copter didn’t anyhow responded and started to fly far away, and landed about 200 metres far from us.
Hardware:
pixhawk 2.4.8
GPS G-model, gps/compass, UBLOX NEO M8N
RC- FrSky x9d, receiver-l9r
Motor- BE4715 330KV
ESC hobbywing X-ROTOR 80A/HV no bec
3 DR power module
I’ve tried to change the Pixhawk and also the GPS module, since I thought the problem was GPS data, and (EKF) failsafe mode, but nothing helped and nothing changed. Log is here.
Any help would be greatly appreciated.