If they have code inside that can do that, and you bought their product, you have the right to get the source code. It would be nice if you contributed it back to us in the form of a github pull request.
I do not think they did anything that fancy, but it would be good if they did
I will certainly try and get that from them to have a closer look.
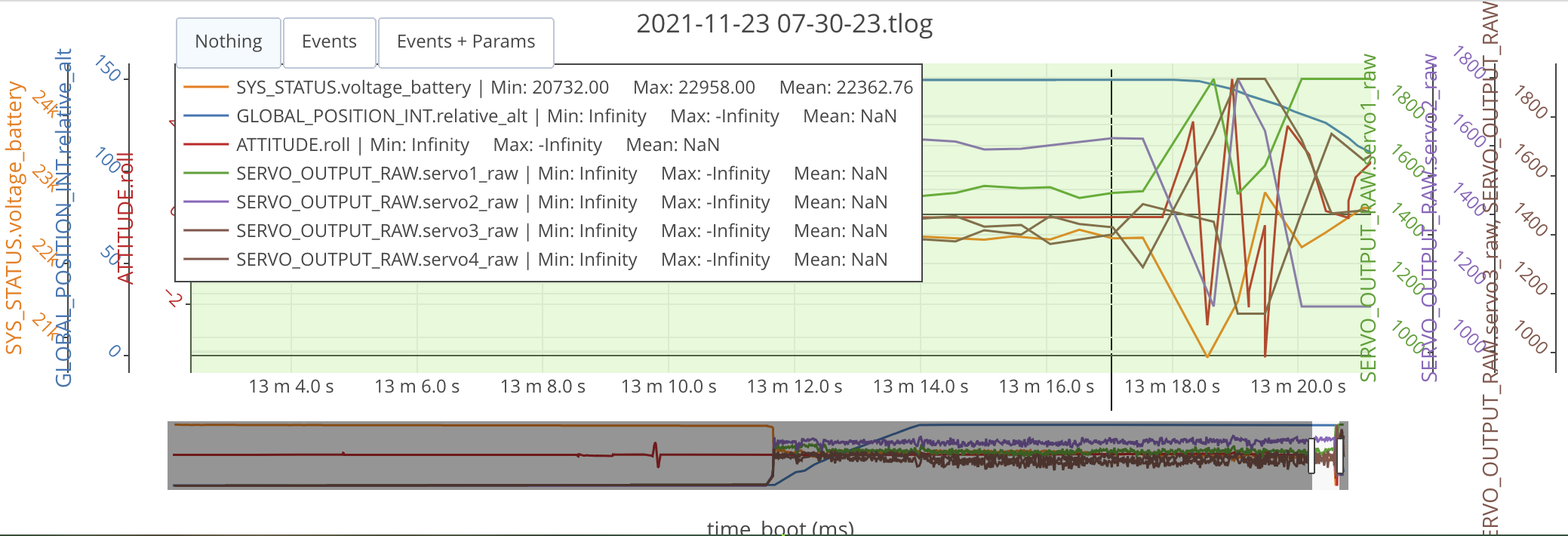
thanks for the explanation. So, according to the tlog, 2 of the motors failed at the same time, right?
When I plotted the tlog using https://plot.ardupilot.org/ I could tell the drone Rolled clockwise and the information about the motors confirms it.
Is there anything that could help indicate or rule out any sort of collision (with a bird, for instance), prior to the abnormal behaviour of the drone?
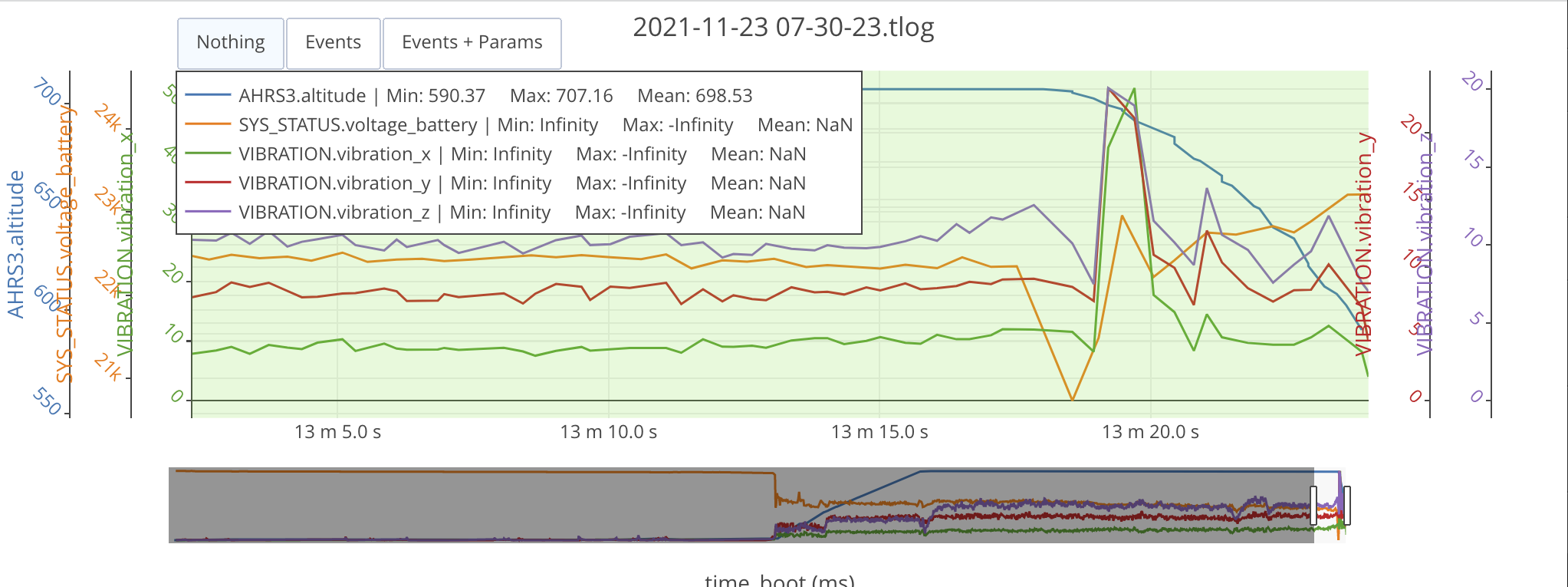
obs: I checked some vibration parameters but I am not sure they would capture this aspect - what do you guys think?
Is there anywhere I could get this information in the documentation? I tried to find it, but maybe I didn’t use the right keywords.
I doubt they did it, either.
Who claimed that it could fly with 3 motors was one of the course instructors and unfortunately I don’t have it written down or documented. After hearing that I felt much more confident to fly the drone with our expensive camera.
that is impressive!
now that I try and picture our (RIP) drone doing it, I see a couple of issues: just to begin with, the propellers were huge and dead sharp. And as the drone was not too small either, I guess someone could’ve gone badly hurt. The size was very similar to their v2: link.
Hello , did you find the cause of your problem? IOMCU reset ?
I had this on one of my machines (helicopter) it disappeared but now it’s back on a new machine, but this time every takeoff for this specific machine , I take my time to understand the real reason for this problem, I changed the autopilot (pixhawk 4 ), the servos, ESC ,bec … it change nothing , I don’t believe that a drop of 0.1v causes this !!, so why not the FMU CPU restarts too !
i can be wrong but for my case I believe that there is a kind of hardware weakness ,lack of insulation ,ground loop , between autopilot and actuators can cause this .


{kind=link}