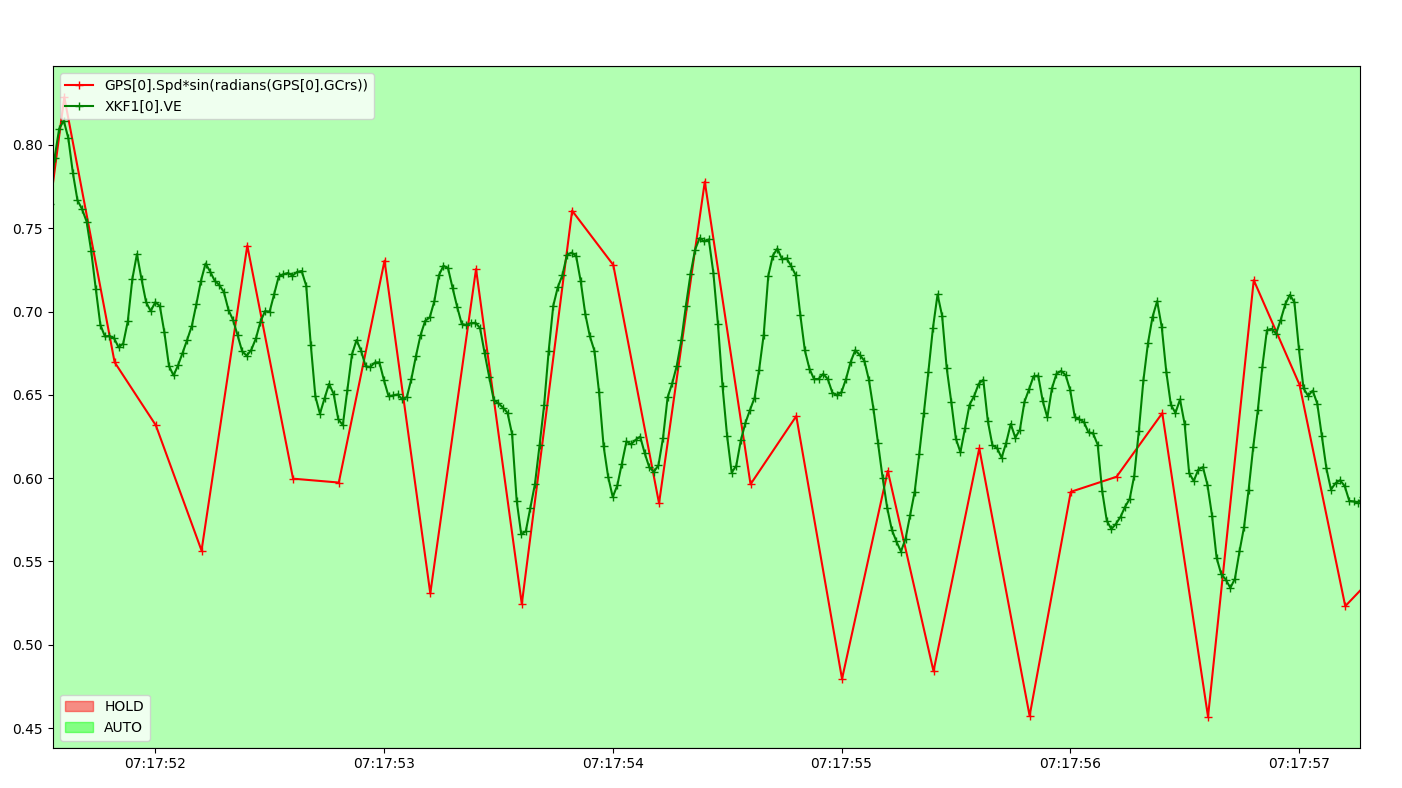
I have noticed about a 4 hz oscillation in the EKF outputs (for example, PIDA.Act or PIDS.Act or even XKF1.VN and XKF1.VE). The oscillations create about a 0.15-0.2 m/sec oscillation in PIDA.Act… Which seems material to me. You can see them in this log.
As a test to see whether this is originating in the drivetrain, in this log I moved my mower by hand - I just pulled it along the ground. There certainly wasn’t a 4 hz oscillation in the vehicle’s velocity in this test. Yet I still see the oscillation in XKF1.VN and XKF1.VE as the vehicle moves. So this oscillation isn’t originating in my drivetrain.
Is this something I should be concerned about? Is there anything I could tune or adjust to reduce this?
Can you hear the output oscillation as motor noise?
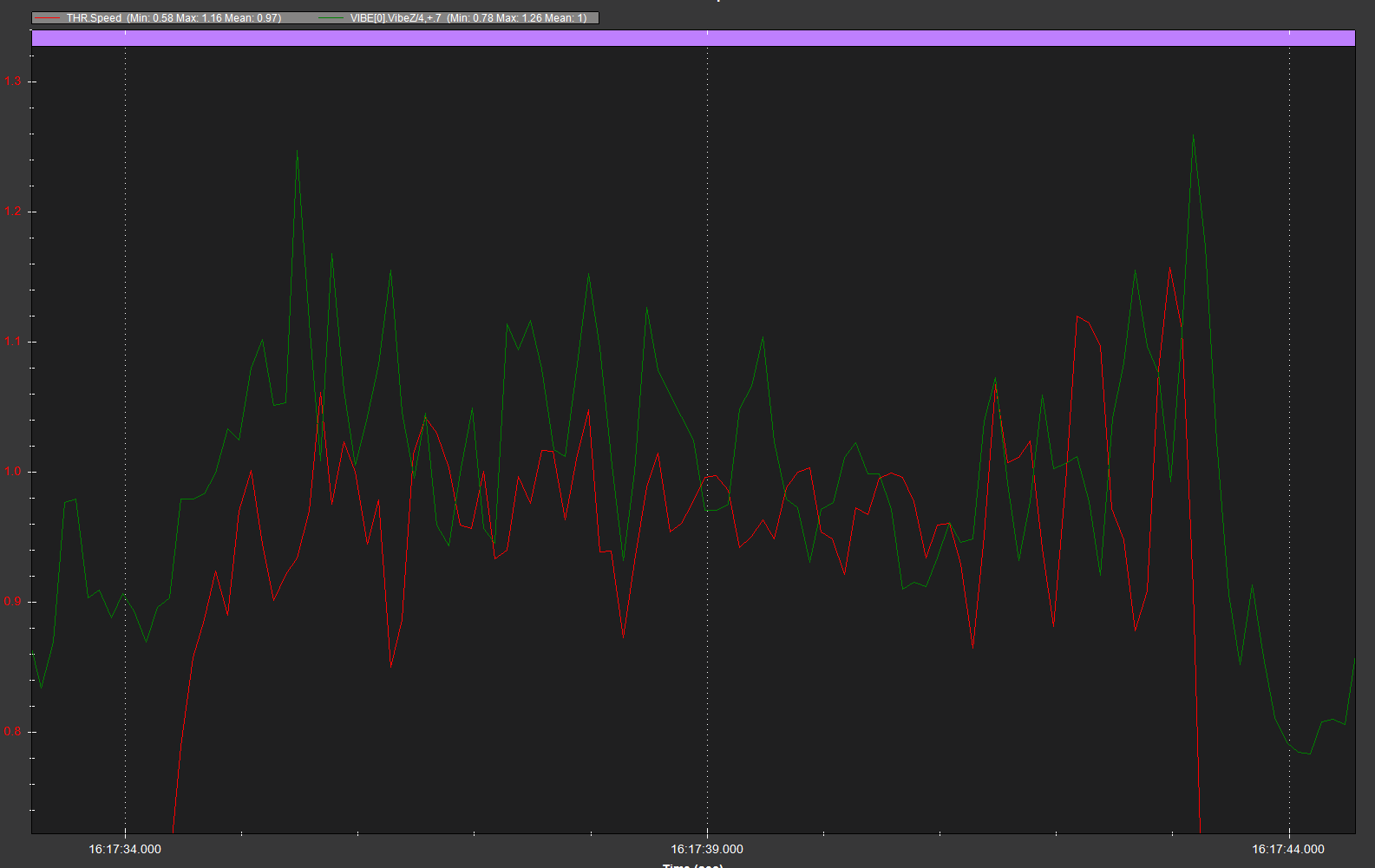
The speed variations seem roughly correlated to z-vibration, as you can see in this graph, where I applied a couple of transformations to get the vibe graph to a similar scale as the speed graph.
I can’t hear any oscillation in the drivetrain. (The gearboxes which connect the motors to the driveshaft are 81:1 3 stage planetary gearboxes and make an audible whine - so I would hear it).
Wheels are about 40 RPM at 1 m/sec, motors are about 3200 RPM. Nothing really moving at 4 hz in the rover.
The ground is grass. Not smooth but not bumpy at an even interval. I wondered about this and tested on pavement (in another logfile) and observed essentially the same data when driving on concrete driveway.
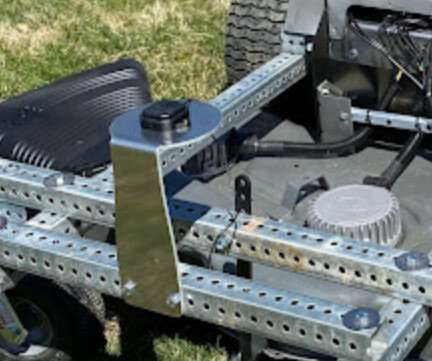
@tridge that GPS is the gps for heading. The other GPS (for position) is further back, between the wheels. I don’t think it’s something physical/mechanical that is actually moving or flexing. I currently suspect some frame vibration or some EMF interference. The long GPS antenna coax wires are coiled up near some other electronics. Thanks @Yuri_Rage for letting me know you aren’t seeing this oscillation.
Interference almost certainly wouldn’t cause an oscillation like this unless your satellite count changes at the same rate.
While interference can impact precision (usually by limiting satellite visibility), it’s not like EMF changes the data. You either receive it or you don’t.
@Yuri_Rage@tridge what is happening at 3-4-5 hz on the mower is that the front wheels are bouncing up and down 2-4cm with bumps in the grass. This causes slight oscillation of the mower about the pitch axis, which causes the primary GPS (which is mounted above the main axis) to oscillate forward and backward a 1 cm or so, which causes the velocity measured by that GPS to oscillate back and forth. I feel pretty strongly that this explains the oscillation I’m seeing.