Hi all,
Drone Configuration:
32" Propellers
Cube Orange Autopilot
Here3+ GPS
Herelink Controller
Lightware SF30/D
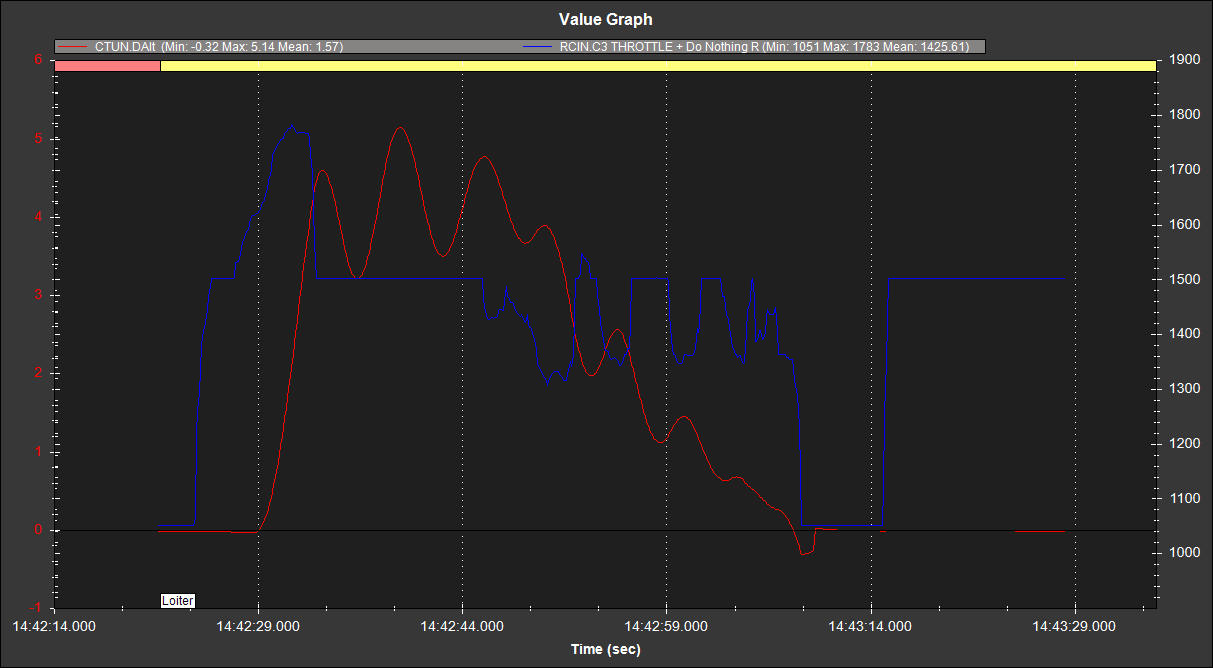
The drone earlier was stable, but to get more accurate Altitude hold, we added bottom facing Lidar and changed EK3_SRC1_POSZ from 1 to 2.
But now, the desired altitude is also changing while Throttle Input is constant. The oscillations were clearly visible (see below attached image)
Link for Log File
Thanks,
Yashika