hey all. any one can help me?
i dont understand why my quad start oscillate at specific height.
At a height of 5 meters my drone is fine, but when it reaches above 10 meters it starts to oscillate
this is my log log
I’m not seeing exactly what you are describing. Please point to a specific time area in the log.
EDIT: maybe an oscillation in pitch axis, that has nothing to do with altitude
I do see some slight oscillation during descent - maybe the MOT_THST_EXPO is too high. I suspect it should be more like 0.5 or even slightly lower.
Please describe your copter in some detail.
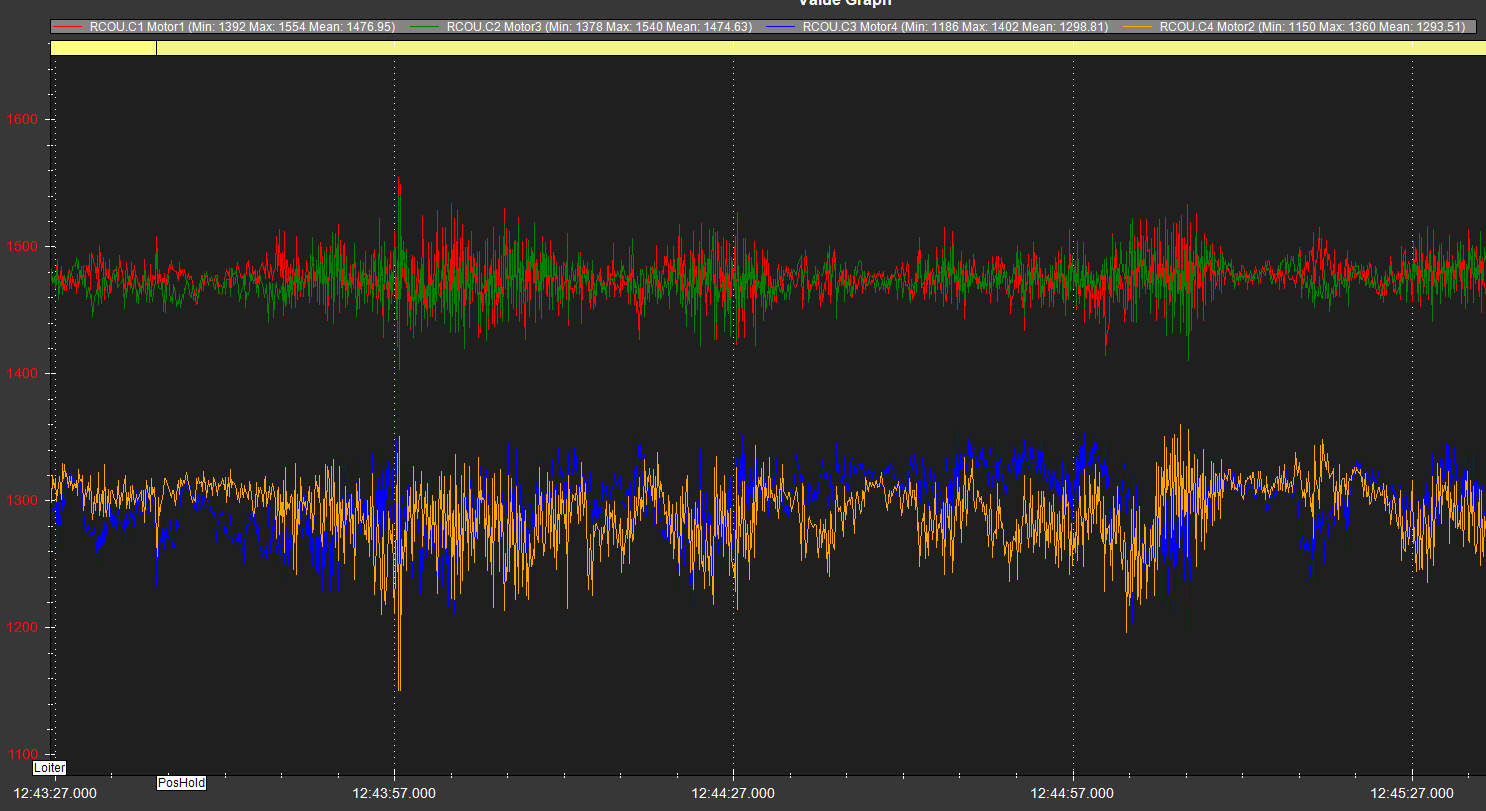
Also there is a huge difference in output between clockwise and counter-clockwise motors, which indicates motor mount or frame twist. If you can fix this and rerun Autotune everything should be quite a bit better.
EDIT: Ah, I see you’ve moved the motors around, so it’s a COG/weight imbalance - the copter might benefit from being better balanced.
Also you can leave these set:
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
so we can see if the Harmonic Notch Filter is set up correctly and doing it’s job.
hey, thanks for your answer. this is my new flight log log
i think its because of poor pitch axis PID. i have done quiktune alos autotune.
but when flight in poshold or loiter myquad begin oscillate
-
Frame : DC Rajawali Krakatoa 7inch -
Flight Controller: Matek H743 Slim V1 -
ESC: Holybro Teko32 f4 65A -
GPS: Sologood GPS M10-180C -
Motors: Eco II 2807 1300KV -
Battery: Li-ion 6S3P 9000mah
You haven’t used ArduPilot methodic configurator software, have you?
1 Like
no, im not using Ardupilot methodic configurator
Ok, thanks fof letting us know.
Try these as a starting point, and fix that big weight imbalance first
ATC_ACCEL_Y_MAX,72000
ATC_ANG_PIT_P,18
ATC_ANG_RLL_P,18
ATC_ANG_YAW_P,11
ATC_RAT_PIT_D,0.002
ATC_RAT_PIT_I,0.10
ATC_RAT_PIT_P,0.10
ATC_RAT_RLL_D,0.0015
ATC_RAT_RLL_I,0.08
ATC_RAT_RLL_P,0.08
ATC_RAT_YAW_D,0.02
ATC_RAT_YAW_I,0.02
ATC_RAT_YAW_P,0.2
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,3
FFT_MAXHZ,550
FFT_MINHZ,70
FFT_NUM_FRAMES,2
FFT_OPTIONS,0
FFT_WINDOW_SIZE,128
GPS_GNSS_MODE,5
INS_HNTCH_BW,25
INS_HNTCH_FREQ,50
MOT_THST_EXPO,0.54
You can copy/paste all these into notepad and save as “updates.param” then load them all via MissionPlanner / Full Parameter List / Load from File (top right)
You can also try GPS_GNSS_MODE,65 but dont select a whole lot of things like you had.
3 Likes
You should configure for Bdshot and use Bdshot ESC RPM for the Notch filter. You have the Bdshot firmware and it’s configured for Dhot600, why not?
When i set SERVO_BLH_BDMASK = 15, at firs arming my esc beeping and some of motor not spinning, i must disarm and re arm
Usually because all the required parameters are not set.The hardware you have is commonly used with Bdshot. Did you configure these?
SERVO_DSHOT_ESC
SERVO_DSHOT_RATE
Yes I have configured it.
SERVO_DSHOT_ESC = 1
SERVO_DSHOT_RATE = 0
Pada tanggal Sen, 29 Jul 2024 08.09, Dave via ArduPilot Discourse <noreply@ardupilot.org> menulis: