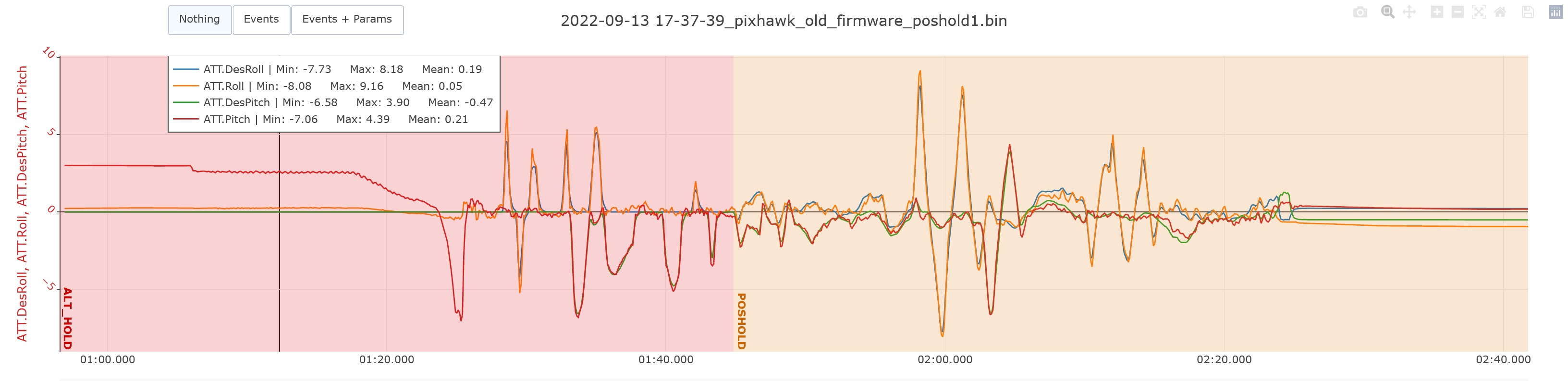
4.0.2 Pixhawk1 Hex, looks pretty good with defaults and initial params, using EKF2
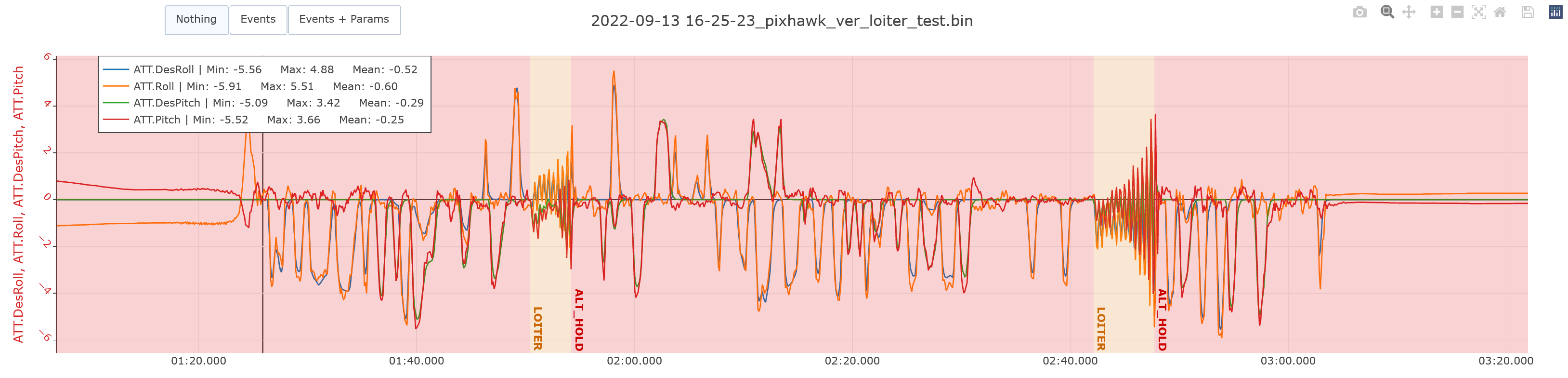
4.2.3 Pixhawk1 Hex, looks OK except when in Loiter mode, using EKF3
PSC_ACC_XY_FILT,2 present in 4.0.2 not in 4.2.3 , unsure if this makes a difference, I’ve never changed it.
PSC_VELXY_D,0.5 which is the default is 4.2 and above - only noted because I changed it slightly in my recent build, as per below.
I cant actually pick out what would cause the Loiter oscillations between the two, but something has become more sensitive.
Hi @Leonardthall are you able to take a look? Basically same build with two different firmware versions yet vastly different Loiter behaviour. I’ve seen this a couple of times lately, although not experienced it myself. No appreciable difference between parameters except where noted above.
This is hijacking your thread a bit, but by way of example…
I very recently set up a Quad X8 and it flew well on defaults+initial and some slight PID changes I made before flying. I also pre-configured the HNOTCH based on what I expected to work (and fine tuned it later). It didn’t appear to have this loiter issue at all, in fact it seemed like Autotune wouldnt even be needed. Starting params:
ATC_ACCEL_P_MAX,92000
ATC_ACCEL_R_MAX,92000
ATC_ACCEL_Y_MAX,18000
ATC_ANG_PIT_P,8
ATC_ANG_RLL_P,8
ATC_ANG_YAW_P,5
ATC_INPUT_TC,0.2
ATC_RAT_PIT_D,0.006875
ATC_RAT_PIT_I,0.11
ATC_RAT_PIT_P,0.11
ATC_RAT_RLL_D,0.006875
ATC_RAT_RLL_I,0.11
ATC_RAT_RLL_P,0.11
ATC_RAT_YAW_I,0.036
ATC_RAT_YAW_P,0.36
After Autotune it came up like it was some crazy racing quad - and it could handle it too. There was nothing strange about it and performance was great! I’ve softened these a bit since the Autotune because this is meant to carry a large gimbal and camera. You can see the accels and PID’s came up very high.
ATC_ACCEL_P_MAX,120000
ATC_ACCEL_R_MAX,120000
ATC_ACCEL_Y_MAX,28000
ATC_ANG_PIT_P,22
ATC_ANG_RLL_P,20
ATC_ANG_YAW_P,8
ATC_INPUT_TC,0.23
ATC_RAT_PIT_D,0.008
ATC_RAT_PIT_I,0.18
ATC_RAT_PIT_P,0.18
ATC_RAT_RLL_D,0.008
ATC_RAT_RLL_I,0.2
ATC_RAT_RLL_P,0.2
ATC_RAT_YAW_I,0.09108223
ATC_RAT_YAW_P,0.9108223
One thing I also manually changed with the expectation that Loiter would be very sensitive on this craft was
PSC_VELXY_D,0.3 (you have PSC_VELXY_D,0.5 which is the default)
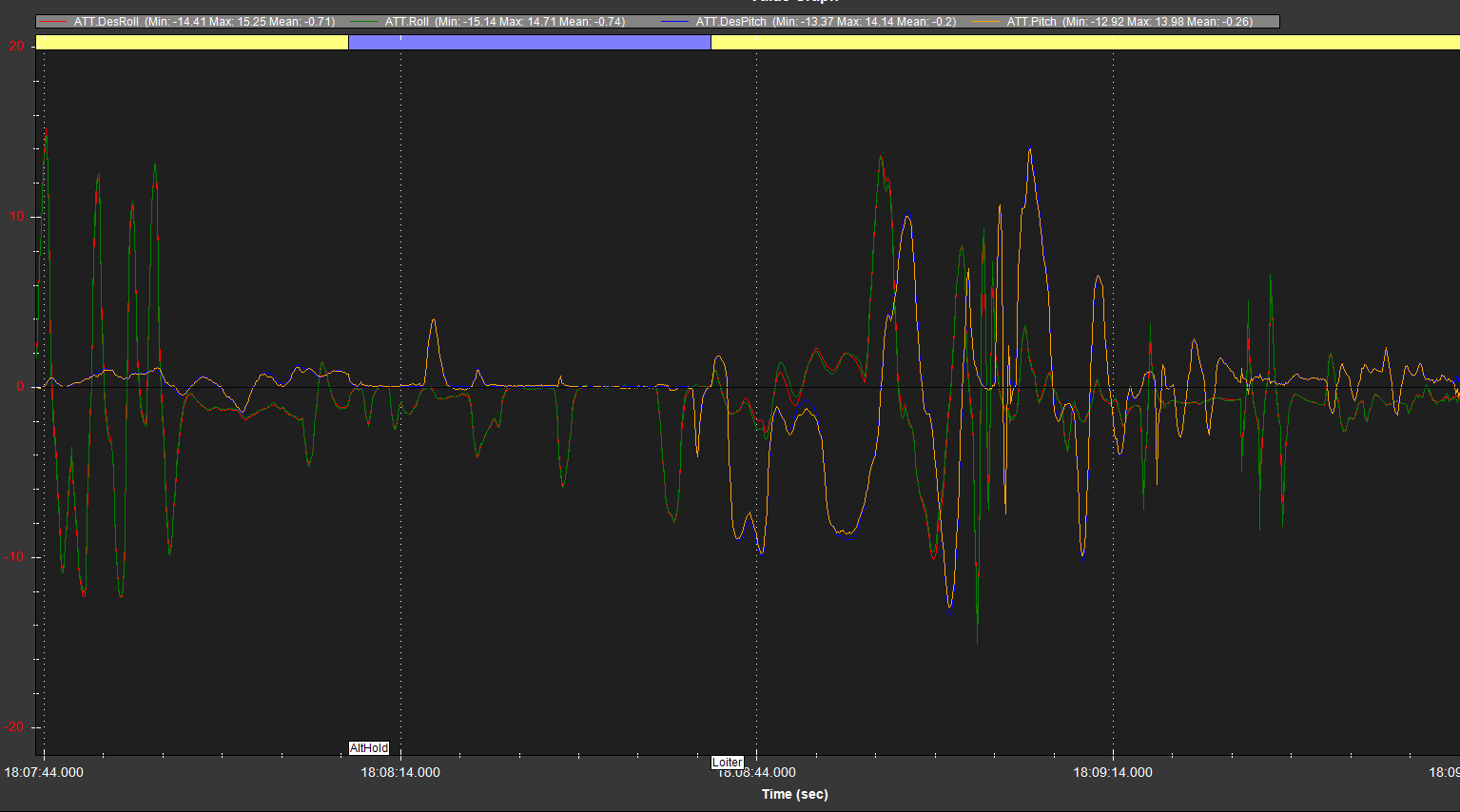
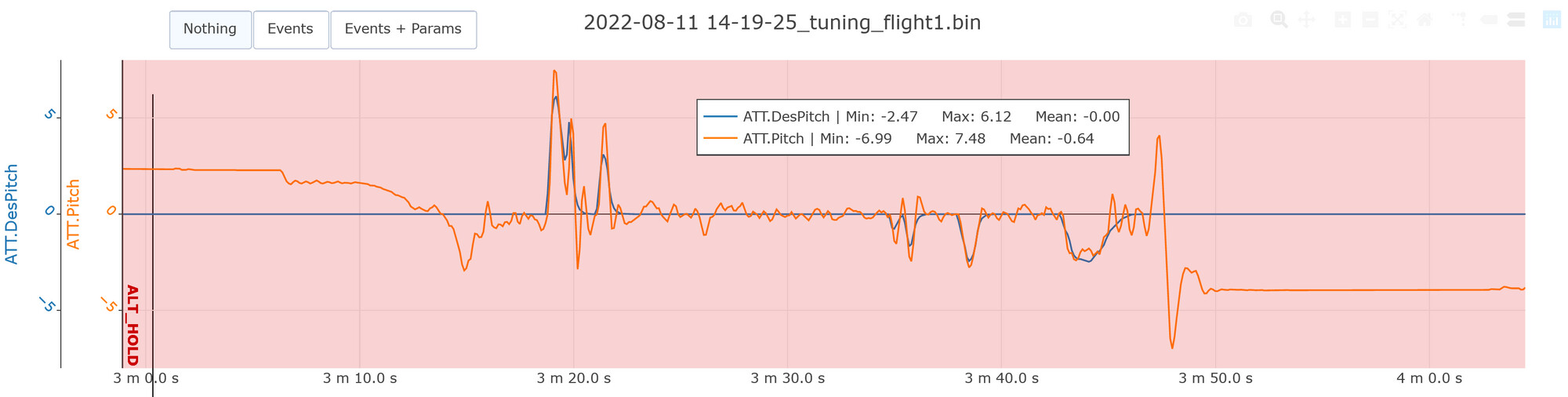
You can see in this graph there’s nothing wrong with attitude control, even in Loiter - this is after I softened everything too.
In fact I’ve probably got to reduce the accels some more and add some expo or dead zone to the pitch and roll sticks, since the aircraft follows the tiny little spring oscillations of the self-centering sticks when you let them go (even gently)
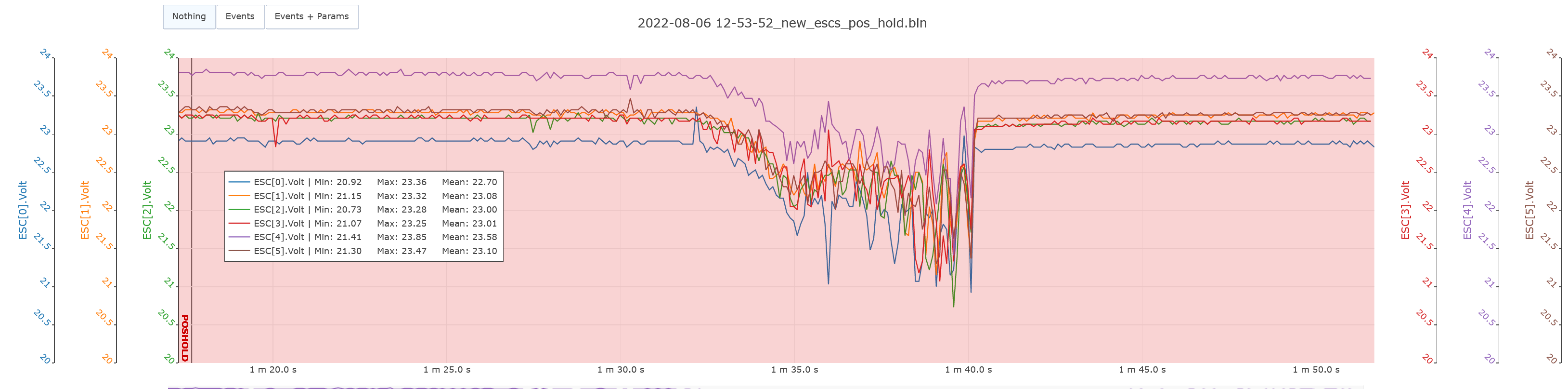
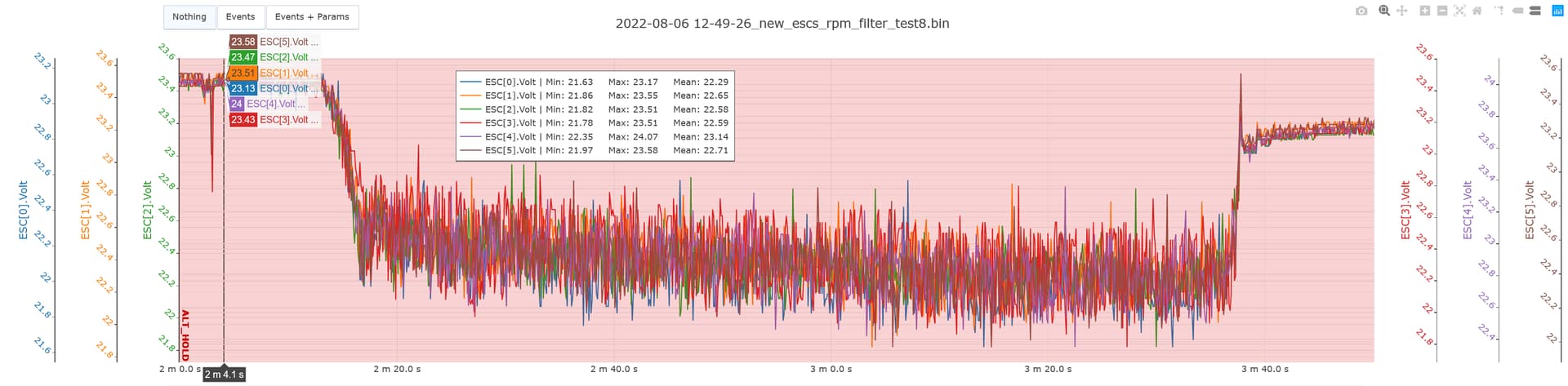
The motors and props came of an old Quad X8 tarot 650 sport frame with about 2kg of old conventional ESCs and wiring. Now it’s using two 4-in-1 45A BLHELI ESCs with DHSOT600. 6S 12Ahr battery. New frame and FC.



")