I’ve been trying for a few days trying to connect a Seagull #GPK2 GPS receiver (U-blox F9P) to my new Orange Cube+ via SERIAL4 (GPS 2). Unfortunately, Mission Planner cannot connect to this GPS receiver.
You misunderstood me. I do not connect a GPS receiver to Mission Planner. I connected as I wrote #GPK2 to Orange +. Mission Planner shows that FC is unable to configure GPS2.
I can be wrong but I think GPS is connected by I2C bus or CAN and my F9Ps just works after connection. I didn’t have to set anything in parameters of arducopter.
Yes, I checked the M9P at u-center and it works fine. I connected the GPS to Pixhawk 4 again after uploading Copter 4.3.5 and it works, I have 3D fix. The question is why it doesn’t work with Cube+.
I would just check the wiring in connectors… Is it the same in Pixhawk 4 and Cube + ? Did you compare parameters of Pixhawk 4 and Cube ? They are the same ?
The wiring should be consistent between the two boards.
Unless you have another GPS connected on SERIAL3 (GPS1), set the following:
SERIAL3_PROTOCOL=-1
SERIAL4_PROTOCOL=5
GPS_TYPE=1
GPS_TYPE2=0
GPS_AUTO_CONFIG=1
The baud rate is immaterial. It is auto-detected and set.
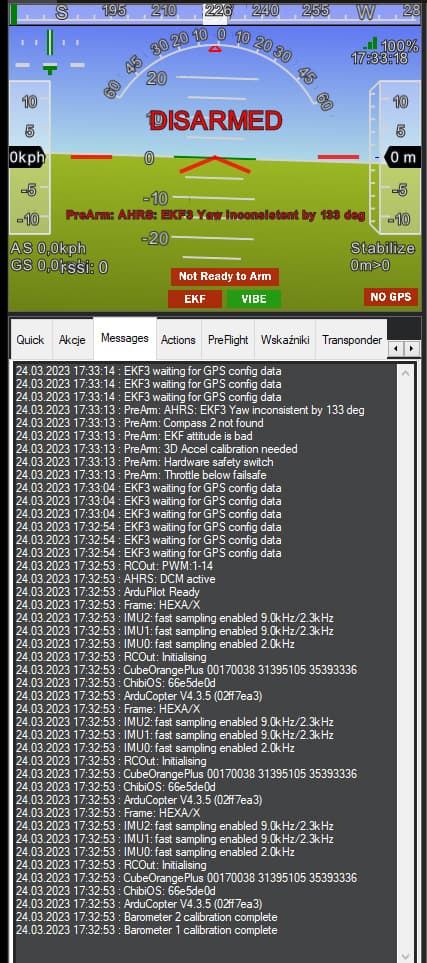
Yes, connections, parameters, software version, everything is the same. When connected to Cube+, it keeps popping up: EKF3 waiting for GPS config data. So Cube+ for some reason is not able to configure the GPS receiver.
There is still no connection to GPS (NO GPS), I set everything as you wrote.
GPS_TYPE_2=0 affects on SERIAL4, so if the GPS is connected to the GPS2 port, the GPS_TYPE_2 parameter set to 0 blocks its configuration.
Incorrect. You are conflating GPS_TYPE2 with the port labeled GPS2.
GPS_TYPE is the first configured GPS. If you only have one GPS, then GPS_TYPE is the parameter that dictates its behavior, regardless of how it’s connected or what the port label says.
I suspect that your autopilot is attempting to configure two GPS modules and failing to do so.
Check all of the SERIALx_PROTOCOL parameters and ensure SERIAL4_PROTOCOL is the only one set to GPS (5).
And stop forcing your autopilot to look for a second GPS by enabling GPS_TYPE2.
After changing any of these parameters, reboot to ensure they take effect properly.
For some reason I must have missed SERIAL1, after setting SERIAL1_PROTOCOL=2 GPS caught a 3D fix. GPS_TYPE2=9 is because I connected a second Here3+ GPS receiver. Now both have 3D fix. Thank you!
I’ve never mixed CAN and serial GPS modules on the same vehicle. You might try switching GPS_TYPE=9 and GPS_TYPE2=1 and see if that fixes the EKF3 initialization. If that makes things worse, switch back, put the vehicle outside, and just let it sit for a while. Perhaps it needs almanac data (that’s a bit of a shot in the dark…).
Lastly, and probably least advisable, you could try GPS_AUTO_CONFIG=0 as well.