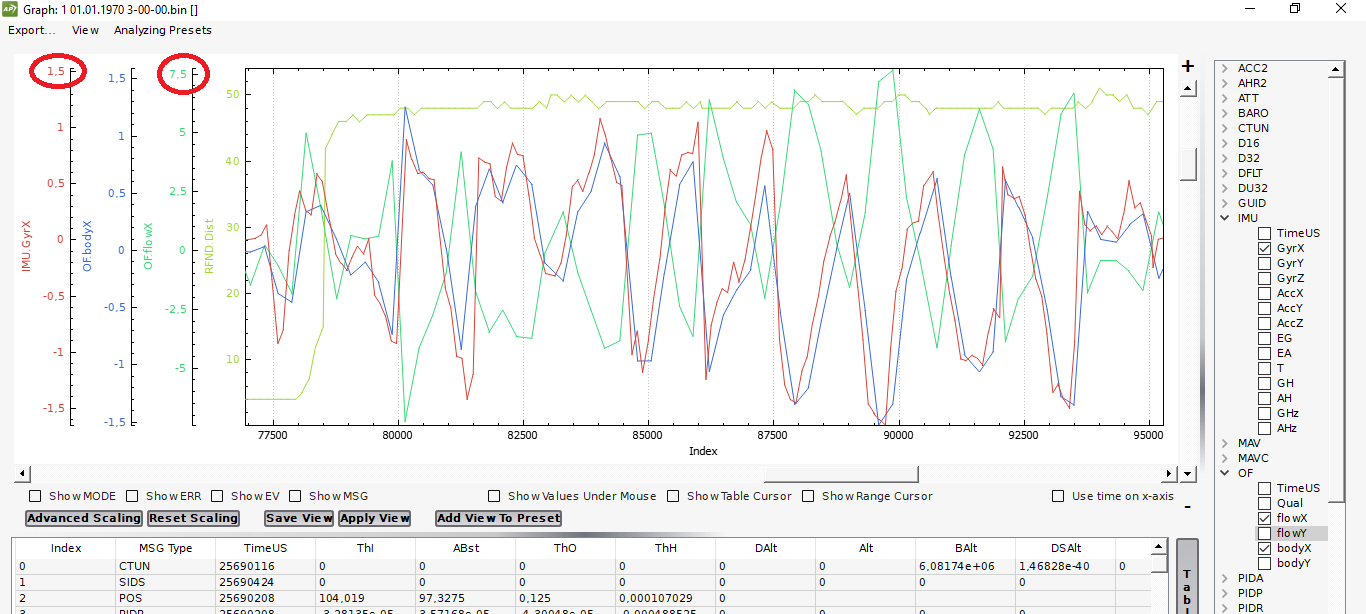
I’m trying to calibrate Optical Flow using the dataflash log. The values OF.flowX OF.bodyX and OF. flowY OF. bodyY on the charts for some reason with different signs, as well as at different scales, the values of scaler and orientation changes, does not help . Can anyone have any idea what the problem is?
I use GY-91 as a gyroscope and Mate k 3901-L0X as lidar and OF. The gyroscope is actually rotated 180 degrees. But changing FLOW_ORIENT_YAW did not produce results. Another point, in INAV, I indicated that the gyroscope module I set align to 180 degrees, and this corresponded to the documentation. In ardupilot, for normal copter operation, AHRS_ORIENTATION had to specify yaw=270.